"STM Position"
| Position: Positions-Sollwert. Umrechnung von Grad (°) in Inkremente: siehe unten. |
Umrechnung von Positions-Sollwerten
Die Formel für die Umrechnung eines Positions-Sollwerts von Grad (°) in Inkremente ist abhängig davon, ob Sie einen Encoder einsetzen.
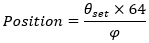
- Wenn Sie keinen Encoder einsetzen (Feedback type = „Internal counter“), nutzen Sie diese Formel:
|
| Position: Sollwert [Inkremente] Θset: Sollwert [°] φ: Schrittwinkel des Motors [°] |
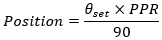
- Wenn Sie einen Encoder einsetzen (Feedback type = „Encoder“), nutzen Sie diese Formel:
|
| Position: Sollwert [Inkremente] Θset: Sollwert [°] PPR: Auflösung des Encoders [Inkremente/Umdrehung] |