RTD-Messung mit Beckhoff Klemmen
RTD Spezifikation und Konvertierung
Die Temperaturmessung mit widerstandsabhängigem RTD-Sensor umfasst generell zwei Schritte:
- Elektrische Messung des Widerstands, ggf. in mehreren Ohm’schen Messbereichen
- Konvertierung (Umrechnung, Transformation) des Widerstands per Software in einem Temperaturwert nach eingestelltem RTD-Typ (Pt100, Pt1000…).
Beide Schritte können lokal im Beckhoff Messgerät stattfinden. Die Transformation im Gerät kann auch deaktiviert werden, wenn sie übergeordnet in der Steuerung gerechnet werden soll. Je nach Gerätetyp können mehrere RTD-Konvertierungen implementiert sein, die sich dann nur in Software unterscheiden. Dies bedeutet für Beckhoff RTD-Messgeräte, dass
- eine Spezifikation der elektrischen Widerstandsmessung gegeben ist
- und darauf aufbauend im Folgenden je nach unterstütztem RTD-Typ die Auswirkung für die Temperaturmessung angegeben wird. Zu beachten ist, dass RTD-Kennlinien immer als Formeln höherer Ordnung oder durch eine Stützstellentabelle in der Software realisiert werden, so dass eine lineare Übertragung R→T nur in einem engen Bereich sinnvoll ist.
Hinweis zu 2-/3-/4-Leiter-Anschluss im R/RTD-Betrieb
Bei der einfachen 2-Leiter-Messung beeinflusst der Leitungswiderstand der zu dem Sensor geführten Zuleitungen den gemessenen Wert. Ist eine Reduzierung dieses systematischen Fehleranteils bei der 2-Leiter-Messung angestrebt, ist der Zuleitungswiderstand zum Messwiderstand einzurechnen, dieser Zuleitungswiderstand muss dann allerdings erst ermittelt werden.
Unter Berücksichtigung der Unsicherheit dieses Zuleitungswiderstands kann dieser dann statisch in die laufende Rechnung einbezogen werden, z.B. bei der EL3751 über das CoE‑Objekt 0x8000:13 und bei ELM350x/ ELM370x über das CoE‑Objekt 0x80n0:13.
Eine z.B. durch Alterung oder Temperatur bedingte Widerstandsänderung der Zuleitung wird jedoch nicht automatisch erfasst. Gerade die Temperaturabhängigkeit von Kupferleitungen mit ~4000ppm/K (entspricht 0,4%/K!) ist nicht unwesentlich beim 24/7-Betrieb!
Durch die 3-Leiter-Messung ist es möglich den systematischen Anteil zu eliminieren, unter der Annahme, dass die zwei Zuleitungen identisch sind. Bei dieser Messungsart wird der Leitungswiderstand einer Zuleitung dauernd gemessen. Der ermittelte Wert wird dann zwei Mal von dem Messergebnis abgezogen und der Leitungswiderstand so eliminiert. Dies führt technisch zu einer deutlich zuverlässigeren Messung. Unter Berücksichtigung der Messunsicherheit ist der Gewinn durch den 3-Leiter-Anschluss allerdings nicht so erheblich, da diese Annahme einer hohen Ungewissheit unterliegt - die einzelne, nicht nachgemessene Leitung könnte doch beschädigt oder unbemerkt widerstandsvariant sein.
Der 3-Leiter-Anschluss ist also ein technisch bewährter Ansatz, bei einer methodisch nach Messunsicherheit bewerteten Messung wird dringend der voll-kompensierte 4‑Leiter‑Anschluss empfohlen.
Sowohl bei 2-Leiter- als auch bei 3-Leiter-Anschluss beeinflussen die Übergangswiderstände der Klemmkontakte den Messvorgang. Durch einen anwenderseitigen Abgleich bei gesteckter Signalverbindung kann die Messgenauigkeit weiter erhöht werden.
Hinweis | |
Messung von kleinen Widerständen Insbesondere bei Messungen im Bereich ca. < 10 Ω wird der 4-Leiter-Anschluss durch die relativ hohen Zuleitungs- und Übergangswiderstände unbedingt erforderlich. Zu bedenken ist auch dass bei solch niedrigen Widerständen die relative Messabweichung bezogen auf den MBE hoch werden kann - für solche Messungen sind ggf. Widerstandsmessklemmen mit kleinen Widerstands-Messbereichen wie z.B. die EL3692 in 4-Leiter-Messung zu verwenden |
Entsprechende Überlegungen führen auch im Brückenbetrieb zu den gängigen Anschlussmethoden:
- Vollbrücke: 4-Leiter-Anschluss ohne Leitungskompensation, 6-Leiter-Anschluss mit voller Leitungskompensation
- Halbbrücke: 3-Leiter-Anschluss ohne Leitungskompensation, 5-Leiter-Anschluss mit voller Leitungskompensation
- Viertelbrücke: 2-Leiter-Anschluss ohne Leitungskompensation, 3-Leiter-Anschluss mit theoretischer und 4-Leiter-Anschluss mit voller Leitungskompensation
 | Angaben zu den Sensortypen in nachfolgender Tabelle Die in der folgenden Tabelle aufgeführten Werte zu den Sensortypen werden hier lediglich zu informativen Zwecken als Orientierungshilfe dargestellt. Alle Angaben sind ohne Gewähr und müssen mit dem Datenblatt des jeweiligen verwendeten Sensors überprüft werden. |
Die RTD-Messung umfasst eine Verkettung von Mess- und Rechenelementen, die auf die erzielbare Messabweichung einwirken:
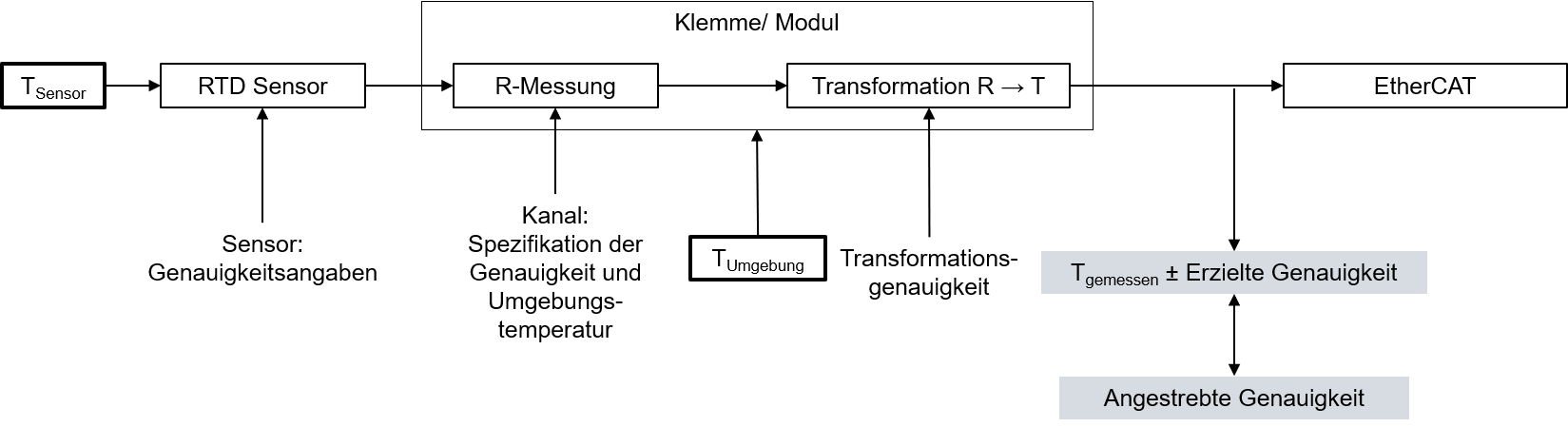 Abb.79: Verkettung der Unsicherheiten in der RTD-Messung
Abb.79: Verkettung der Unsicherheiten in der RTD-MessungMaßgebend für die erzielbare Temperatur-Messgenauigkeit ist die angegebene Widerstands-Spezifikation. Im Folgenden wird sie auf die möglichen RTD-Typen angewendet.
Aufgrund
- der bei RTD vorhandenen Nichtlinearität und damit der starken Abhängigkeit der Spezifikationsdaten von der Sensortemperatur Tsens und
- des Einflusses der Umgebungstemperatur auf das verwendete Analogeingangsgerät (führt zu einer Veränderung von Tmeasured aufgrund von ∆Tambient obwohl Tsens = konstant)
werden im Folgenden keine detaillierten Temperatur-Spezifikationstabellen angegeben, sondern
- eine Kurztabelle mit Angabe des elektrischen Messbereichs und Orientierungswert für die Grundgenauigkeit
- eine grafische Darstellung der Grundgenauigkeit über Tsens (dies bei zwei Beispiel-Umgebungstemperaturen damit aufgrund der real vorliegenden Umgebungstemperatur grafisch auf die erzielbare Grundgenauigkeit geschlossen werden kann)
- Formeln, um weitere Kenngrößen (Offset/Gain/Nichtlinearität/Wiederholgenauigkeit/Rauschen) bei Bedarf aus der Widerstandsspezifikation beim gewünschten Betriebspunkt zu berechnen
Hinweise zur Berechnung detaillierter Spezifikationsangaben
Sind weitere Spezifikationsangaben von Interesse, können bzw. müssen sie aus den in der Widerstandsspezifikation gegebenen Werten berechnet werden.
Zum Ablauf:
- Allgemein: Die Umrechnung wird hier nur für einen Messpunkt (ein bestimmtes Eingangssignal) erklärt, bei mehreren Messpunkten (bis hin zum ganzen Messbereich) müssen die Schritte einfach wiederholt werden.
- Falls der gemessene Widerstand bei dem gemessenen Temperaturmesspunkt nicht bekannt ist, muss der Messwert (MW) in [Ω] ermittelt werden:
MW = RMesspunkt (TMesspunkt) mithilfe einer R→T Tabelle - Bei diesem Widerstandswert wird die Abweichung berechnet
- Über die Gesamtformel

- oder einen Einzelwert, z.B. FEinzel = 15 ppmMBE
- muss die Messunsicherheit in [Ω] berechnet werden:
FWiderstand(RMesspunkt) = FGesamt(RMesspunkt) ⋅ MBE
oder: FWiderstand(RMesspunkt) = FEinzel(RMesspunkt) ⋅ MBE
oder (falls schon bekannt) z.B.: FWiderstand(RMesspunkt) = 0,03 Ω - Dann muss die Steigung an der verwendeten Stelle ermittelt werden:
ΔRproK(TMesspunkt) = [ R(TMesspunkt + 1°C) – R(TMesspunkt )] / 1°C
mithilfe einer R→T Tabelle - Über die Widerstands-Messunsicherheit und die Steigung kann die Temperatur-Messunsicherheit berechnet werden
FTemp(RMesspunkt) = (FWiderstand(TMesspunkt)) / (ΔRproK(TMesspunkt) ) - Um den Fehler des gesamten Systems bestehend aus RTD und dem Messgerät in [°C] zu ermitteln, müssen die beiden Fehler quadratisch addiert werden.

Im Folgenden drei Beispiele, die verwendeten Zahlenwerte dienen der Veranschaulichung. Maßgebend bleiben die in den techn. Daten genannten Spezifikationswerte.
Beispiel 1:
Grundgenauigkeit einer ELM3504 bei 35°C Umgebung, Messung von -100°C im PT1000-Interface (4-Leiter), ohne Rausch- und Alterungs-Einflüsse:
TMesspunkt = -100 °C
MW=RPT1000, -100°C = 602,56 Ω

= 86,238 ppmMBE
FWiderstand(RMesspunkt) = 86,238 ppmMBE ⋅ 2000 Ω = 0,1725 Ω
ΔRproK(TMesspunkt) = (R(-99 °C) – R(-100 °C)) / (1 °C) = 4,05 Ω/°C
FELM3504@35°C, PT1000, -100°C = (0,1725 Ω)/(4,05 Ω/°C) ≈ 0,043 °C (bedeutet ±0,043 °C)
Beispiel 2:
Betrachtung allein der Wiederholgenauigkeit unter o.a. Bedingungen:
TMesspunkt = -100 °C
MW = RMesspunkt (-100 °C) = 602,56 Ω
FEinzel = 10 ppmMBE
FWiderstand= 10 ppmMBE ⋅ 2000 Ω = 0,02 Ω
ΔRproK(TMesspunkt) = (R-99°C – R-100°C) / 1°C = 4,05 Ω/°C
FTemp(RMesspunkt) = 0,02 Ω / 4,05 Ω/°C ≈ 0,005°C (bedeutet ±0,005 °C)
Beispiel 3:
Betrachtung allein des RMS-Rauschens ohne Filter unter o.a. Bedingungen:
TMesspunkt = -100°C
MW = RMesspunkt (-100°C) = 602,56 Ω
FEinzel = 37 ppmMBE
FWiderstand = 37 ppmMBE ⋅ 2000 Ω = 0,074 Ω
ΔRproK(TMesspunkt) = (R-99°C – R-100°C)/1°C = 4,05 Ω/°C
FTemp(RMesspunkt) = 0,074 Ω / 4,05 Ω/°C ≈ 0,018°C (bedeutet ± 0,018°C)
Beispiel 4:
Wird das Rauschen FNoise, PtP der o.a. Beispielklemme nicht nur für einen Sensorpunkt -100°C sondern allgemein betrachtet ergibt sich folgender Plot:
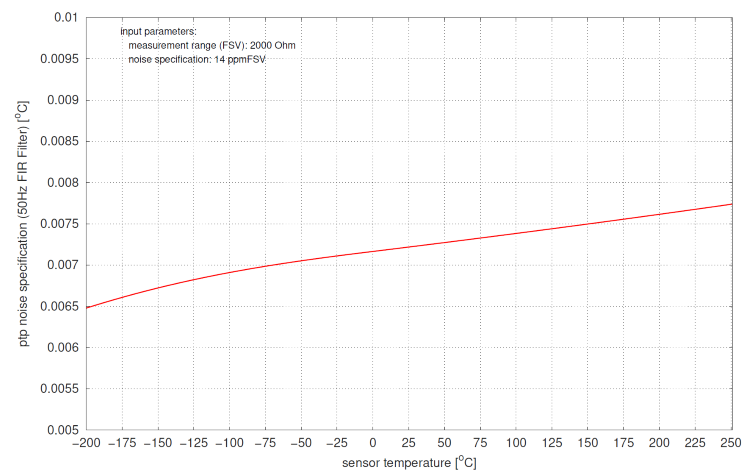 Abb.80: Diagramm Rauschen FNoise, PtP in Abhängigkeit zur Sensortemperatur
Abb.80: Diagramm Rauschen FNoise, PtP in Abhängigkeit zur SensortemperaturEinstellung „B-Parameter Equation“ für NTC-Sensoren
Die B-Parameter-Gleichung kann auf NTC-Sensoren (Heißleiter), d.h. RTD-Elemente mit negativem Koeffizienten k, angewendet werden.
Dabei gibt der Koeffizienten RT0 den Widerstand bei der Temperatur T0 an, der B-Parameter kann den Angaben des Sensorherstellers entnommen oder durch Messung des Widerstandes bei zwei bekannten Temperaturen bestimmt werden.
In der Dokumentation zur EL3204-0200 ist dazu eine hilfreiche Excel-Datei zu finden.
Die Parameter sind dann im CoE 0x80n7 einzugeben
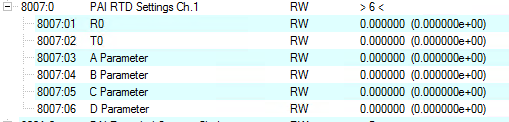 Abb.81: ELM37xx/ CoE-Objekt 0x80n7: PAI RTD Settings Ch.1
Abb.81: ELM37xx/ CoE-Objekt 0x80n7: PAI RTD Settings Ch.1mit
RT0 → 0x80n7:01
B → 0x80n7:04
T0 → 0x80n7:02
Einstellung „DIN IEC 60751“ für Pt-Sensoren
Die Berechnung für T > 0°C nach
ist implementiert, die Parameter sind dann im CoE 0x80n7 einzugeben
mit
A bzw. α → 0x80n7:03
B bzw. β → 0x80n7:04
R0 → 0x80n7:01
Einstellung „Steinhart Hart“ für NTC-Sensoren
Die Steinhart-Hart Gleichung kann auf NTC-Sensoren (Heißleiter), d.h. RTD-Elemente mit negativem Koeffizienten k, angewendet werden.

Die Koeffizienten C1, C2 und C4 können entweder direkt den Herstellerdaten entnommen, oder aber berechnet werden. Zur Berechnung der Steinhart-Hart Parameter steht ebenfalls in der EL3204-0200 Dokumentation eine Beispieldatei zur Verfügung. Zur Bestimmung der Parameter werden die Widerstandswerte bei drei bekannten Temperaturen benötigt. Diese können entweder den Herstellerdaten entnommen oder direkt am Sensor gemessen werden. Der Parameter C3 läuft in den meisten Fällen gegen Null, und ist somit zu vernachlässigen, er wird daher nicht in der Berechnung der Beispieldatei berücksichtigt.
Die Parameter sind dann im CoE 0x80n7 einzugeben
mit
A → 0x80n7:03
B → 0x80n7:04
C → 0x80n7:05
D → 0x80n7:06