Konfiguration des Inkremental-Encoders
Falls Sie einen Inkremental-Encoder einsetzen, konfigurieren Sie ihn mit den folgenden CoE-Parametern:
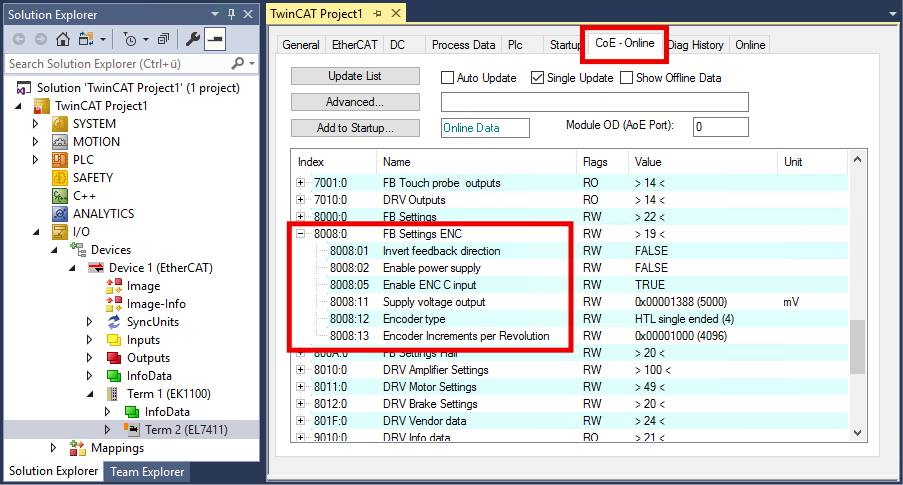
Index | Bezeichnung | Einheit |
|---|---|---|
8008:01hex | Invert feedback direction | - |
8008:02hex | Enable power supply | - |
8008:05hex | Enable ENC C input | - |
8008:11hex | mV | |
8008:12hex | - | |
8008:13hex | Inc/U |
8008:11 „Supply voltage output“
Stellen Sie in diesem Parameter die Höhe der Versorgungsspannung für den Encoder in Millivolt ein. Der Wertebereich ist 2…24 V.
Schalten Sie den Versorgungsspannungs-Ausgang ein, indem Sie den Parameter 8008:02 „Enable power supply“ auf TRUE setzen.
8008:12 „Encoder type“
Stellen Sie in diesem Parameter den Signaltyp des Encoders ein.
Wenn der Wert dieses Parameters nicht „disabled“ ist, muss ein Encoder angeschlossen sein. Ansonsten wird in der Diag History ein Fehler gemeldet.
In der Werkseinstellung ist „HTL single ended“ eingestellt.
Signaltyp | Max. Eingangsfrequenz 1) | Stromsenke 2,5 mA | Signalpegel | Signalpegel | Kommentar |
|---|---|---|---|---|---|
disabled |
| - | - | - | Inkrementalencoderinterface deaktiviert Wird bei Six-Step Hall vom DM2 deaktiviert |
RS422 differential | 5 Mio Inc/s | nein | Udiff < -0,45 V | Udiff > +0,45 V | - |
TTL single ended | 1 Mio Inc/s | ja | < 0,8 V | > 3,0 V | - |
HTL differential | 5 Mio Inc/s | nein | Udiff < -2 V | Udiff > +2 V | - |
HTL single ended | 5 Mio Inc/s | ja | < 6 V | > 9,2 V | - |
RS422 differential – high impedance input | 5 Mio Inc/s | nein | Udiff < -0,45 V | Udiff > +0,45 V | Für Anwendungen, in denen die Signale des Encoders zu schwach sind |
TTL single ended – input filters disabled | 5 Mio Inc/s | ja | < 0,8 V | > 3,0 V | Höhere Signalfrequenz möglich. Störempfindlicher. |
Open collector | 250.000 Inc/s | nein | < 0,8 V | > 2,0 V | Encoder schaltet gegen Ground |
1) Bei 4-fach Auswertung.
8008:13 „Encoder Increments per Revolution“
Multiplizieren Sie die Anzahl der Inkremente des Encoders mit dem Faktor vier. Tragen Sie das Ergebnis in diesen Parameter ein.
Falls Sie einen magnetischen Encoder mit Interpolation einsetzen, berechnen Sie die Anzahl der Inkremente nach der folgenden Formel:

Beispiel:
