Homing
(Master TwinCAT 2.11 R3)
Die hier angegebenen Daten sind beispielhaft für einen Servomotor AM3121-0200-0001 der Firma Beckhoff Automation aufgeführt. Bei anderen Motoren und je nach Applikation können die Werte variieren.
Inhaltsverzeichnis |
|---|
Referenzierung
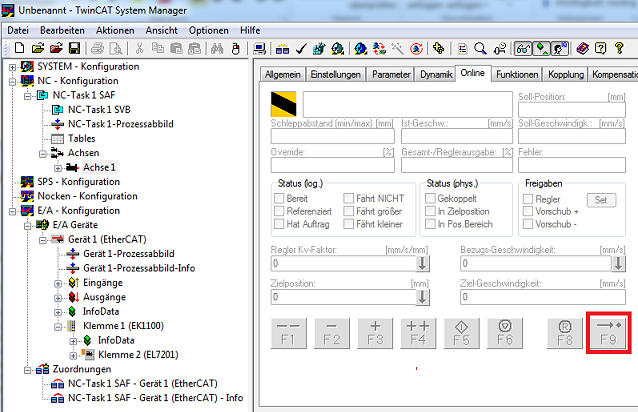
Die Referenzierung funktioniert nicht über den Online-Inbetriebnahme-Reiter der Achse (siehe Abb. Online-Homing in der NC), da die Referenznocke nicht direkt an der EL72x1 angeklemmt werden kann.
Funktionsbaustein "MC_Home"
- Die Referenzierung muss aus der SPS heraus durchgeführt werden. Dazu wird hier der Funktionsbaustein MC_Home aus der TC MC2 Lib genutzt.
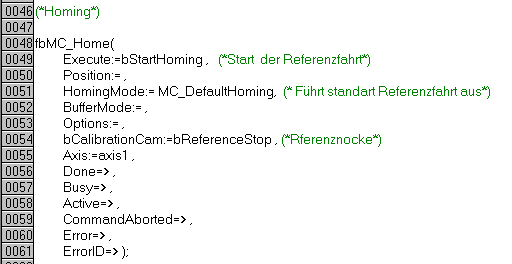
- Folgende minimale Beschaltung ist in dem MC_Home notwendig.
- Der HomingMode, mit dem Sie auswählen können, welchen Modus Sie für die Referenzierung nutzen möchten.
- Der Execute, mit dem Sie die Referenzfahrt starten können.
- Und bCalibrationCam, der mit Ihrer Referenznocke verknüpft werden muss, um die Referenzfahrt zu stoppen.
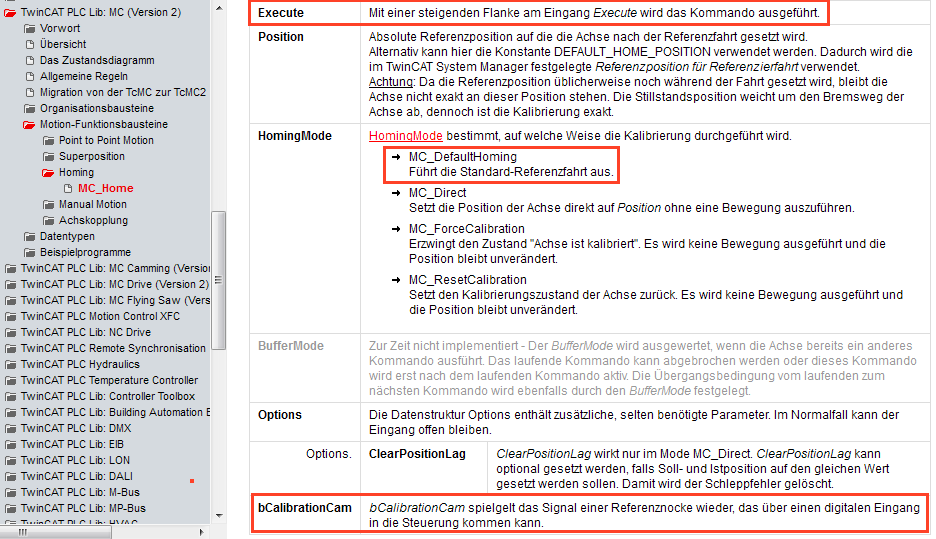
- In der folgenden Abb. Auszug der Funktionsbeschreibung des MC_Home sehen Sie einen Auszug aus der Funktionsbeschreibung des MC_Home. Die gesamten Informationen entnehmen Sie bitte direkt aus der zugehörigen Funktionsbeschreibung.
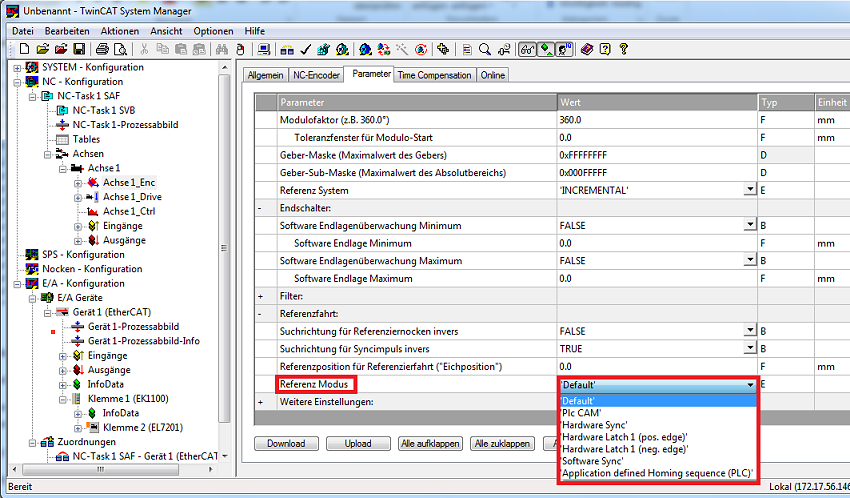
Referenz Modi
- Die EL72x1 kann mit den folgenden Referenz Modi der NC betrieben werden (siehe Abb. Auswahl der Referenz Modi in der NC).
- Default: Ist eine allgemeine Einstellung und für die meisten Anwendungen geeignet.
Fährt der Motor an den Referenznocken, wird eine Richtungsumkehr ausgelöst. Mit dem abfallenden Signal des Nocken bleibt der Motor stehen und die Referenzposition ist gesetzt. - Software Sync: Die C-Spur wird virtuell nachgebildet.
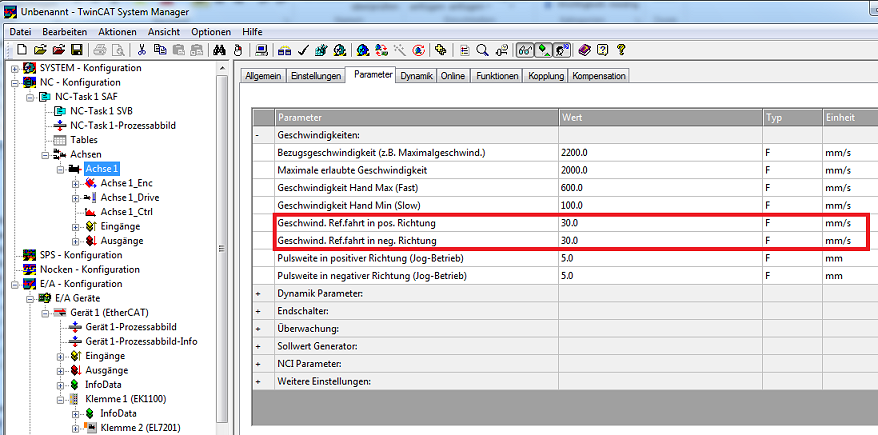
Weiterhin lässt sich in der NC die Geschwindigkeit einstellen die bei der Referenzfahrt genutzt werden soll (Abb. Einstellung der Referenzgeschwindigkeit).