Prozessdaten MDP742
Inhaltsverzeichnis |
|---|
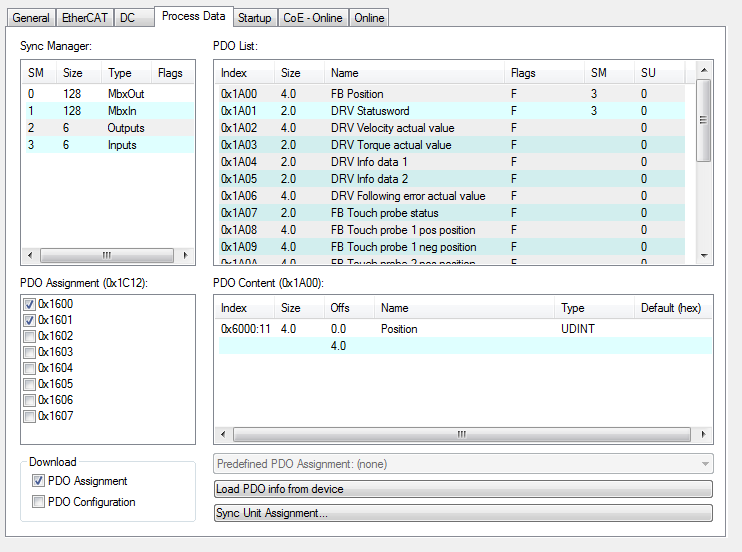
Sync Manager (SM)
Sync Manager (SM) Der Umfang der angebotenen Prozessdaten kann über den Reiter „Prozessdaten“ verändert werden (siehe folgende Abb.).
PDO-Zuordnung
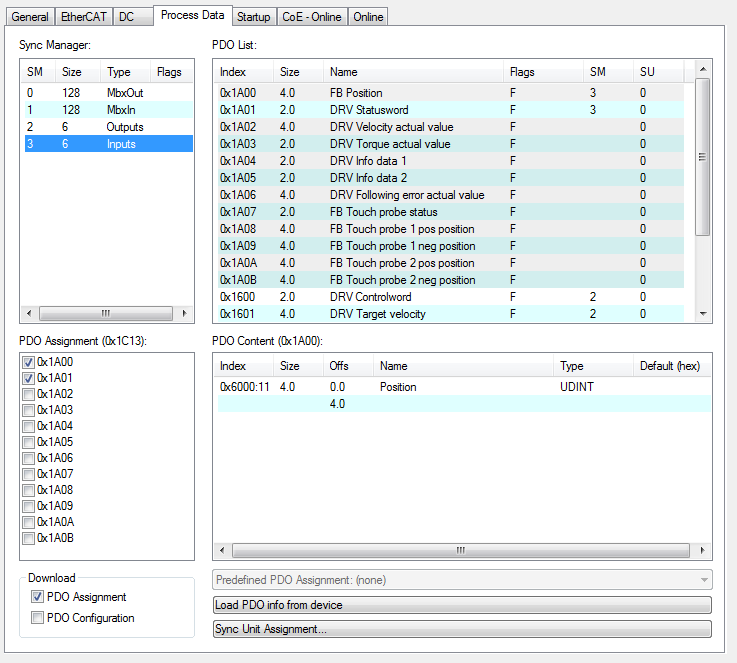
- Zur Konfiguration der Prozessdaten markieren Sie im oberen linken Feld „Sync Manager“ (siehe Abb. Karteireiter Prozessdaten SM3, EL72x1-0010) den gewünschten Sync Manager (editierbar sind hier SM2 und SM3).
- Im Feld darunter „PDO Zuordnung“ können dann die diesem Sync Manager zugeordneten Prozessdaten an- oder abschaltet werden.
- Ein Neustart des EtherCAT-Systems oder Neuladen der Konfiguration im Config-Modus (F4) bewirkt einen Neustart der EtherCAT-Kommunikation und die Prozessdaten werden von der Klemme übertragen.
SM2, PDO-Zuordnung 0x1C12
Index | Größe (Byte.Bit) | Name | PDO Inhalt |
|---|---|---|---|
0x1600 (default) | 2.0 | DRV Controlword | 0x7010:01 - Controlword (2.0) |
0x1601 (default) | 4.0 | DRV Target velocity | 0x7010:06 - Target velocity (4.0) |
0x1602 | 2.0 | DRV Target torque | 0x7010:09 - Target torque (2.0) |
0x1603 | 2.0 | DRV Commutation angle | 0x7010:0E - Commutation angle (2.0) |
0x1604 | 2.0 | DRV Torque limitation | 0x7010:0B - Torque limitation (2.0) |
0x1605 | 2.0 | DRV Torque offset | 0x7010:0A - Torque offset (2.0) |
0x1606 | 4.0 | DRV Target position | 0x7010:05 - Target position (4.0) |
0x1607 | 2.0 | FB Touch probe control | 0x7001:01 - Touch probe function_TP1 Enable (0.1) 0x7001:09 - Touch probe function_TP2 Enable (0.1) |
0x1608 | 1.0 | DRV Modes of operation | 0x7010:03 - Modes of operation (1.0) |
0x1630* | 40.0 | DMC Outputs | 0x7030:02 - DMC_FeedbackControl_Enable latch extern on positive edge (0.1) 0x7030:11 - DMC_DriveControl_Enable (0.1) 0x7030:21 - DMC_PositioningControl_Execute (0.1) 0x7030:31 - DMC_Set counter value (8.0) |
0x1630* | 40.0 | DMC Outputs 32 Bit | 0x7030:02 - DMC_FeedbackControl_Enable latch extern on positive edge (0.1) 0x7030:11 - DMC_DriveControl_Enable (0.1) 0x7030:21 - DMC_PositioningControl_Execute (0.1) 0x7030:31 - DMC_Set counter value (4.0) |
*) ab Firmware 19
SM3, PDO-Zuordnung 0x1C13
Index | Größe (Byte.Bit) | Name | PDO Inhalt |
|---|---|---|---|
0x1A00 (default) | 4.0 | FB Position | 0x6000:11 - Position (4.0) |
0x1A01 (default) | 2.0 | DRV Statusword | 0x6010:01 - Statusword (2.0) |
0x1A02 | 4.0 | DRV Velocity actual value | 0x6010:07 - Velocity actual value (4.0) |
0x1A03 | 2.0 | DRV Torque actual value | 0x6010:08 - Torque actual value (2.0) |
0x1A04 | 2.0 | DRV Info data 1 | 0x6010:12 - Info data 1 (2.0) |
0x1A05 | 2.0 | DRV Info data 2 | 0x6010:13 - Info data 2 (2.0) |
0x1A06 | 4.0 | DRV Following error actual value | 0x6010:09 - Following error actual value (4.0) |
0x1A07 | 2.0 | FB Touch probe status | 0x6001:01 - Touch probe status_ TP1 Enable (0.1) 0x6001:09 - Touch probe status_ TP2 Enable (0.1) |
0x1A08 | 4.0 | FB Touch probe 1 pos. position | 0x6001:11 - TP1 Pos position (4.0) |
0x1A09 | 4.0 | FB Touch probe 1 neg. position | 0x6001:12 - TP1 Neg position (4.0) |
0x1A0A | 4.0 | FB Touch probe 2 pos. position | 0x6001:13 - TP2 Pos position (4.0) |
0x1A0B | 4.0 | FB Touch probe 2 neg. position | 0x6001:14 - TP2 Neg position (4.0) |
0x1A0C | 2.0 | FB Status | 0x6000:0E - Status_TxPDO State (0.1) |
0x1A0E | 1.0 | DRV Modes of operation display | 0x6010:03 - Modes of operation display (1.0) |
0x1A30* | 64.0 | DMC Inputs | 0x6030:02 - DMC_FeedbackStatus_Latch extern valid (0.1) 0x6030:11 - DMC_DriveStatus_Ready to enable (0.1) 0x6030:21 - DMC_PositioningStatus_Busy (0.1) 0x6030:31 - DMC_Set position (8.0) |
Index | Größe (Byte.Bit) | Name | PDO Inhalt |
|---|---|---|---|
0x1A31* | 64.0 | DMC Inputs 32 Bit | 0x6030:02 - DMC_FeedbackStatus_Latch extern valid (0.1) 0x6030:11 - DMC_DriveStatus_Ready to enable (0.1) 0x6030:21 - DMC_PositioningStatus_Busy (0.1) 0x6030:31 - DMC_Set position (4.0) |
*) ab Firmware 19
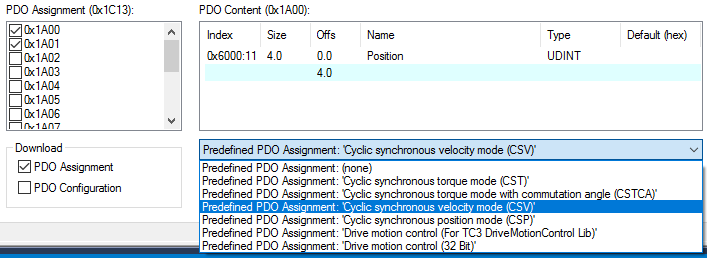
Predefined PDO Assignment
Eine vereinfachte Auswahl der Prozessdaten ermöglicht das "Predefined PDO Assignment". Am unteren Teil des Prozessdatenreiters wählen Sie die gewünschte Funktion aus. Es werden dadurch alle benötigten PDOs automatisch aktiviert, bzw. die nicht benötigten deaktiviert.
Sechs PDO-Zuordnungen stehen zur Auswahl:
Name | SM2, PDO-Zuordnung | SM3, PDO-Zuordnung |
|---|---|---|
Cyclic synchronous velocity mode | 0x1600 (DRV Controlword) 0x1601 (DRV Target velocity) | 0x1A00 (FB Position) 0x1A01 (DRV Statusword) |
Cyclic synchronous torque mode | 0x1600 (DRV Controlword) 0x1602 (DRV Target torque) | 0x1A00 (FB Position) 0x1A01 (DRV Statusword) 0x1A03 (DRV Torque actual value) |
Cyclic synchronous torque mode with commutation angle | 0x1600 (DRV Controlword) 0x1602 (DRV Target torque) 0x1603 (DRV Commutation angle) | 0x1A01 (DRV Statusword) |
Cyclic synchronous position mode | 0x1600 (DRV Controlword) 0x1606 (DRV Target position) | 0x1A00 (FB Position) 0x1A01 (DRV Statusword) 0x1A06 (DRV Following error actual value) |
Drive motion control (For TC3 DriveMotionControl Lib)* | 0x1630 (DMC Outputs) | 0x1A30 (DMC Inputs) |
Drive motion control (32 Bit)* | 0x1631 (DMC Outputs 32 Bit) | 0x1A31 (DMC Inputs 32 Bit) |
*) ab Firmware 19