Position controller
In der Betriebsart Position controller arbeitet die EL70x7 im zyklischen Positionsinterface. Über die Variable STM Position kann eine definierte Position eingestellt werden.
Hinweise
- Dieser Betriebsmodus kann sowohl mit angeschlossenem Encoder, als auch mit dem internen Zähler (ohne Encoder) genutzt werden.
- Die Prozessdaten können entweder mit Hilfe der TwinCAT NC oder direkt aus der PLC übertragen werden (Positioning interface).
- Fremdmotoren werden unterstützt
Step by Step
- Fügen Sie die Klemme, wie im Kapitel Konfigurationserstellung TwinCAT - manuell oder - Online Scan beschrieben, zur Konfiguration hinzu.
- Verknüpfen Sie die Klemme, wie im Kapitel Einbindung in die NC-Konfiguration beschrieben, mit der NC (wenn TwinCAT NC genutzt wird).
- Konfigurieren Sie die EL70x7
- automatisch - importieren Sie die Motor XML Datei, wie im Kapitel Einstellungen im CoE - automatisch beschrieben, in das Start-up Verzeichnis.
- manuell - konfigurieren Sie die Parameter, wie im Kapitel Einstellungen im CoE - manuell beschrieben.
- Stellen Sie die Betriebsart im CoE-Verzeichnis auf Position controller, Abb. "Auswahl Position controller".
- Wählen Sie bei den Predefined PDO Assignments Position control, Positioning interface compact, Positioning interface oder Positioning interface with info data , Abb. "Auswahl Predefined PDO Assignment: Position control".
- Aktivieren Sie die Konfiguration (Ctrl+Shift+F4)
- Durchlaufen Sie die State Machine der Klemme. Dazu haben Sie zwei Möglichkeiten.
- Sie nutzen die TwinCAT NC.
Die State Machine wird von der NC automatisch durchlaufen. Sie können die Achse in der Registerkarte "Online" der Achse freigeben.
Setzen Sie alle Häkchen und stellen Sie Override auf 100 % (siehe Abb. "Freigabe der Achse in der NC"). Anschließend ist die Achse bereit. - Sie nutzen nicht die TwinCAT NC.
In diesem Fall müssen Sie die State Machine manuell durchfahren. Setzen Sie dazu die Variable 0x7010:01 Enable auf 1 (TRUE), Abb. "Freigabe der Achse manuell". - Über die zyklische Variable STM Position (Abb. "Eingabe der Position") können Sie eine definierte Position vorgeben.
Die Position wird in Inkrementen angegeben und ist vom ausgewählten Feedback (Index 0x8012:0A) abhängig. Beim internen Zähler mit einem AS10xx Motor entspricht 12.800 (64-fach Microstepping * 200 Vollschritte des AS10xx Motors) eine volle Umdrehung. Beim externen Encoder ist der Wert vom Encoder abhängig. Bei einem Encoder der AS10xx Motoren mit 1024 INC/Umdrehung entspricht 4096 (1024 INC/U * 4-fach Auswertung) einer volle Umdrehung.
 Abb.191: Auswahl „Position controller „
Abb.191: Auswahl „Position controller „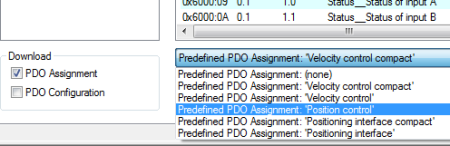 Abb.192: Auswahl Predefined PDO Assignment: „Position control“
Abb.192: Auswahl Predefined PDO Assignment: „Position control“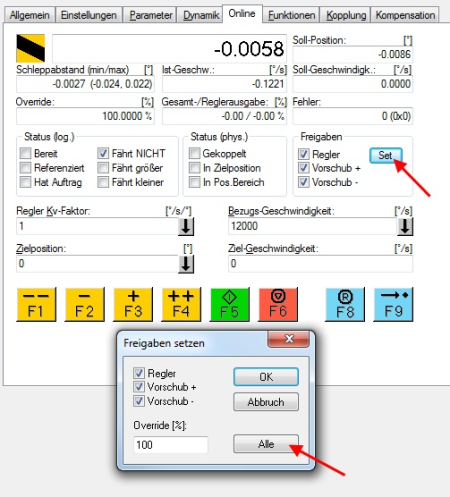 Abb.188: Freigabe der Achse in der NC
Abb.188: Freigabe der Achse in der NC 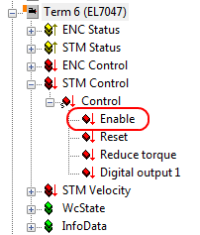 Abb.189: Freigabe der Achse manuell
Abb.189: Freigabe der Achse manuell 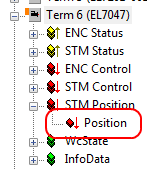 Abb.195: Eingabe der Position
Abb.195: Eingabe der Position