LEDs und Anschlussbelegung
| |
Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das Busklemmen-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Montage, Demontage oder Verdrahtung der Busklemmen beginnen! |

 Abb.4: LEDs und Anschluss EL7037
Abb.4: LEDs und Anschluss EL7037Anschlussbelegung
Klemmstelle | Name | Signal |
|---|---|---|
1 | A | Encoder-Eingang A |
2 | C | Encoder-Eingang C (Nulleingang) |
3 | Encoder-Versorgung +24V | Encoder-Versorgung, intern verbunden mit positivem Powerkontakt und Pin 6, 7 |
4 | A1 | Motorwicklung A1 |
5 | B1 | Motorwicklung B1 |
6 | +24V | +24 VDC, intern verbunden mit positivem Powerkontakt und Pin 3, 7 |
7 | +24V | +24 VDC, intern verbunden mit positivem Powerkontakt und Pin 3, 6 |
8 | Input 1 | Digitaler Eingang 1 (24 VDC) |
9 | B | Encoder-Eingang B |
10 | Latch | Latch Eingang. Der aktuelle Counter-Wert wird als Referenzmarke im Latch-Register gespeichert, wenn |
11 | Encoder-Versorgung 0V | Encoder-Versorgung 0 V. intern verbunden mit negativem Powerkontakt und Pin 14, 15 |
12 | A2 | Motorwicklung A2 |
13 | B2 | Motorwicklung B2 |
14 | 0V | 0 VDC, intern verbunden mit negativem Powerkontakt und Pin 11, 15 |
15 | 0V | 0 VDC, intern verbunden mit negativem Powerkontakt und Pin 11, 14 |
16 | Input 2 | Digitaler Eingang 2 (24 VDC), auch als digitaler Ausgang (0,5 A) konfigurierbar |
LEDs
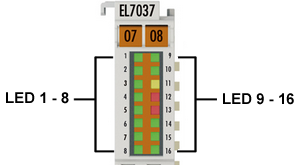 Abb.36: EL7037 - LEDs
Abb.36: EL7037 - LEDsNr. | LED | Farbe | Bedeutung | |
|---|---|---|---|---|
1 | RUN | grün | Diese LED gibt den Betriebszustand der Klemme wieder: | |
aus | Zustand der EtherCAT State Machine: INIT = Initialisierung der Klemme oder BOOTSTRAP = Funktion für Firmware Updates der Klemme | |||
blinkend | Zustand der EtherCAT State Machine: PREOP = Funktion für Mailbox-Kommunikation und abweichende Standard-Einstellungen gesetzt | |||
Einzelblitz | Zustand der EtherCAT State Machine: SAFEOP = Überprüfung der Kanäle des Sync-Managers und der Distributed Clocks. | |||
an | Zustand der EtherCAT State Machine: OP = normaler Betriebszustand; Mailbox- und Prozessdatenkommunikation ist möglich | |||
2 | Encoder | grün | an | Encoder betriebsbereit |
3 | A | grün | an | Am Encoder-Eingang A liegt ein Signal an. |
4 | B | grün | an | Am Encoder-Eingang B liegt ein Signal an. |
5 | C | grün | an | Am Encoder-Eingang C liegt ein Signal an. |
6 | Latch | grün | an | Am Latch-Eingang des Encoders liegt ein Signal an. |
7 | Turn CW | grün | an | Motor wird im Uhrzeigersinn (clock wise) angesteuert |
8 | Input 1 | grün | an | Am digitalen Eingang 1 liegt ein Signal an. |
9 | Driver | grün | an | Treiberstufe betriebsbereit |
10 | Power | grün | aus | Versorgungsspannung (24 VDC) nicht vorhanden oder |
an | Versorgungsspannung (24 VDC) vorhanden | |||
11 | Warning | gelb | an | Konfigurationsfehler, z. B.:
|
12 | Error A | rot | an | Konfigurationsfehler der Endstufe A, z. B.:
|
13 | Error B | rot | an | Konfigurationsfehler der Endstufe B, z. B.:
|
14 | Enable | grün | aus | Motoransteuerung ist gesperrt (Index 0x6010:02 ist nicht gesetzt) oder EL7037 ist nicht betriebsbereit) |
an | Motoransteuerung ist freigeschaltet (Index 0x6010:02 ist gesetzt) und EL7037 ist betriebsbereit | |||
15 | Turn CCW | grün | an | Motor wird gegen den Uhrzeigersinn (counter clock wise) angesteuert |
16 | Input 2 | grün | an | Am digitalen Eingang 2 liegt ein Signal an. |