Prozessdaten
Einführung
In diesem Kapitel werden die einzelnen PDOs mit ihrem Inhalt vorgestellt. Hierbei wird jeweils nur der 1. Kanal vorgestellt, der zweite verhält sind dann analog. Die einzelnen PDOs lassen sich im TwinCAT System Manager einzeln aktivieren bzw. deaktivieren. Dazu dient der Reiter "Prozessdaten" (nur sichtbar wenn links die Klemme ausgewählt ist).
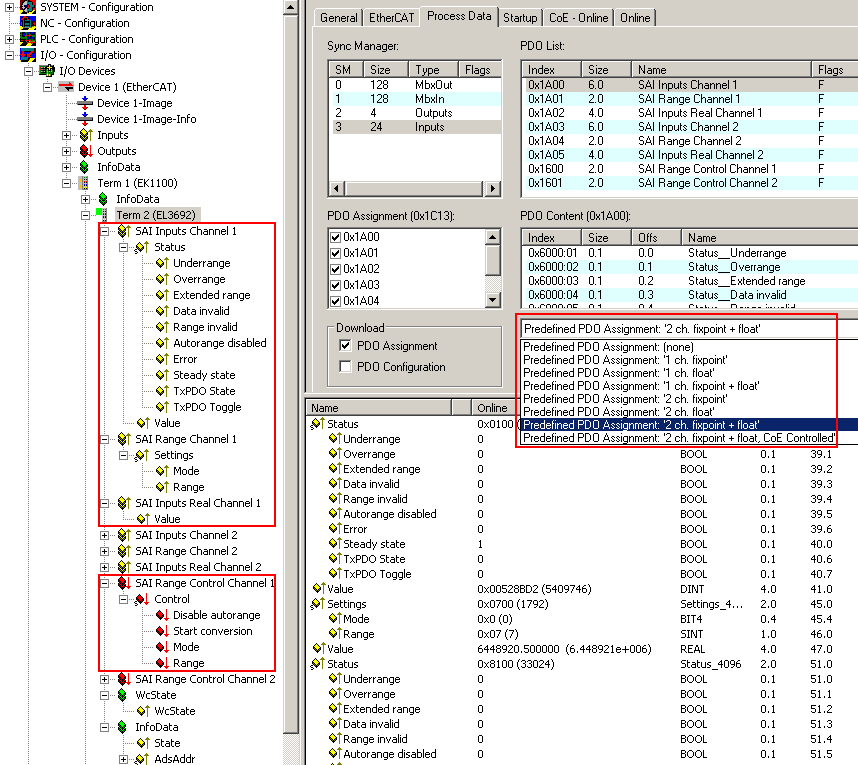 Abb.141: Screenshot Systemmanager, Prozessdaten
Abb.141: Screenshot Systemmanager, ProzessdatenIn Abb. Screenshot Systemmanager, Prozessdaten sind links die EL3692 mit aufgeklappten Prozessdaten zu sehen, Variablen von Kanal 1 sind rot markiert. Rechts ist die Prozessdatenauswahl rot markiert.
Name des PDOs | Datenrichtung | PDO Nummer Kanal 1 | PDO Nummer Kanal 2 |
|---|---|---|---|
SAI Inputs | Input | 0x1A00 | 0x1A03 |
SAI Range | Input | 0x1A01 | 0x1A04 |
SAI Inputs Real | Input | 0x1A02 | 0x1A05 |
SAI Range | Output | 0x1600 | 0x1601 |
Tab. 1: PDO/Kanal-Nummern
 | Darstellung Messwert Die EL3692 kann den aktuellen kanalweisen Messwert je nach PDO-Auswahl „predefined PDO assignment“ in 2 unterschiedlichen Arten ausgeben. Als „fixpoint“ und „float“. Siehe folgende Erklärung: |
- als 32 Bit ganzzahliger messbereichsabhängiger Wert, mit 24 Bit Inhalt "fixpoint"
Erklärung:
Jeder der 9 Messbereiche der EL3692 erstreckt sich über 1 Dekade z. B. 0..10 Ω. Der Wertebereich von Value erstreckt sich dabei regulär für jeden Messbereich von x0 .. x00 7F FF FF, mit "x00 7F FF FF ≈ Messbereichsendwert". Allerdings wird der Messbereich im Autorangebetrieb um bis zu 10% überschritten, um die Messbereichsumschaltung zu gewährleisten. Die Angaben im Status sind zu beachten.
Im Folgenden ein Beispiel für den Messbereich 10 Ω:
Eingangswiderstand | 32 Bit Value, rechtsbündige Darstellung | Interpretation | Statusbits |
|---|---|---|---|
0 Ω | x00 00 00 00 | 0 | Extended Range = 0 |
10 Ω | x00 7F FF FF | 8.388.607 | Extended Range = 1 |
> 11 Ω | x00 8C CC CB | 9.227.467 | Extended Range = 0 |
Es ist zu beachten, dass der relative Messfehler am unteren Messbereichsendwert sehr groß wird. Bei Messung im Bereich < 10% vom Messbereichsendwert ist der nächst niedrigere Messbereich zu benutzen. Die AutoRange-Funktion arbeitet entsprechend.
- als 32 Bit Festkomma-Float-Wert mit Mantisse und Exponent, messbereichsunabhängig "float"
Erklärung:
Diese 32-Bit-Variable kann nach IEC61131 direkt mit einer FLOAT-Variable der PLC verlinkt werden. Die Umrechnung erfolgt in der EL3692, der Anwender muss keine messbereichsabhängige Umrechnung mehr vornehmen.
Predefined PDO Assignment
Um die Konfiguration zu vereinfachen sind in der EtherCAT XML Device Description typische Konfigurationen aus Prozessdaten hinterlegt. In der Prozessdatenübersicht können die vordefinierten Zusammenstellungen ausgewählt werden. Daher steht die Funktion nur zur Verfügung, wenn die XML-Dateien auf dem System aktuell sind (zum Download auf der Beckhoff Webseite). Folgende Kombinationen sind möglich:
- 1. ch fixpoint nur Kanal 1 misst, kein REAL Wert
- 1. ch float nur Kanal 1 misst, mit REAL aber keine Settings
- 1. ch fixpoint + float nur Kanal 1 misst, REAL Wert und Settings
- 2. ch fixpoint beide Kanäle, kein REAL Wert
- 2. ch float beide Kanäle, mit REAL aber keine Settings
- 2. ch fixpoint + float beide Kanäle, REAL Wert und Settings (Standard)
 Abb.142: Auswahldialog predefined PDO
Abb.142: Auswahldialog predefined PDO | Auswahl CoE/PDO-Betriebsart Die EL3692 benötigt eine Anweisung, ob sie mit/ohne Autorange etc. arbeiten soll. Dies kann über CoE oder die Prozessdaten (PDO) eingestellt werden. Deshalb erfolgt diese Unterscheidung auch über die predefined PDO Auswahl: Wird das Control-Word als PDO angezeigt, reagiert die EL3692 nun vorrangig auf die zyklischen Anweisungen aus dem Control-Word. Siehe dazu auch die Erklärungen. |
SAI Inputs 0x1A00 (0x1A03)
Dieser PDO enthält die Status Daten und den Widerstandswert der Klemme. Dabei wird der Widerstandswert als 32-Bit Wert ausgegeben. Der Status der Klemme ist als WORD dargestellt.
Bezeichnung | Erklärung | Position, Größe | Bit im Status WORD |
|---|---|---|---|
Status → Underrange | Messbereich unterschritten. Hinweis: da jeder Messbereich auch bis 0 Ohm misst und es keine negativen Widerstandswerte gibt, wird dieses Bit nie gesetzt. | 0x6000:01, 1 Bit | SW.0 |
Status → Overrange | Messbereich überschritten. | 0x6000:02, 1 Bit | SW.1 |
Status → Extended Range | Erweiterter Messbereich wird genutzt. | 0x6000:03, 1 Bit | SW.2 |
Status → Data invalid | Eingangsdaten sind ungültig. | 0x6000:04, 1 Bit | SW.3 |
Status → Range invalid | Kein gültiger Range gewählt. | 0x6000:05, 1 Bit | SW.4 |
Status → Autorange disabled | Die Autorange Funktion ist deaktiviert. | 0x6000:06, 1 Bit | SW.5 |
Status → Error | Das Fehlerbit wird gesetzt, wenn das Datum ungültig ist (Leitungsbruch, Overrange, Underrange) | 0x6000:07, 1 Bit | SW.6 |
Status → Steady state | Liegen die letzten vier Werten nicht mehr als x / 1024 vom Endwert auseinander wird das "Steady state" Bit auf TRUE gesetzt | 0x6000:09, 1 Bit | SW.8 |
Status → TxPDO State | Gültigkeit der Daten der zugehörigen TxPDO (0=valid, 1=invalid). | 0x6000:0F, 1 Bit | SW.14 |
Status → TxPDO Toggle | Der TxPDO Toggle wird vom Slave getoggelt, wenn die Daten der zugehörigen TxPDO aktualisiert wurden. | 0x6000:10, 1 Bit | SW.15 |
Value | Aktueller Messwert als INT32, Messbereich Ende = 0x7F FF FF (Standard) | 0x6000:11, 4 Byte | - |
Tab. 2: Prozessdaten 0x1A00
Beispielprogramm: Zerlegung von WORDs in Bits.
SAI Inputs 0x1A01 (0x1A04)
Dieser PDO enthält Informationen zum gewählten Messmodus und dem aktuellen Range. Die beiden Werte sind auch innerhalb eines Settings WORDs verfügbar.
Bezeichnung | Erklärung | Position, Größe |
|---|---|---|
Mode | Aktueller Messmodus: | 0x6001:05, 4 Bit |
Range | Aktueller Messbereich (unterer Wert jeweils für den AutorangeBetrieb maßgeblich); | 0x6001:09, 1 Byte |
Tab. 3: Prozessdaten 0x1A01
SAI Inputs 0x1A02 (0x1A05)
Dieser PDO enthält den aktuellen Messwert als REAL-Wert. Das Format entspricht dem REAL aus dem TwinCAT PLC-Control.
Das Format entspricht dem REAL aus der IEC 61131-3, die wiederum beim REAL Format auf die IEC 559 verweist. Dort ist eine REAL Zahl (einfache Genauigkeit) wie folgt definiert (siehe dazu auch Beckhoff InfoSys: TwinCAT PLC Control: Standard Data Types).
|
Bitposition (von links) |
1 |
8 |
23(+1 "hidden bit", siehe IE559) |
|
Funktion |
Vorzeichen |
Exponent |
Mantisse |
Tab. 4: Aufbau der REAL Wertes
|
Bezeichnung |
Erklärung |
Position, Größe |
|---|---|---|
|
Value |
Aktueller Messwert als REAL |
0x6002:01, 4 Byte |
Tab. 5: Prozessdaten 0x1A02
SAI Inputs 0x1600 (0x1601)
Über diesen PDO werden kann die Klemme gesteuert werden. Die Daten sind auch als Control WORD verfügbar.
Bezeichnung | Erklärung | Position, Größe | Bit im Control WORD |
|---|---|---|---|
Control → Disable autorange | Anforderung Autorange zu deaktivieren. | 0x6000:01, 1 Bit | CW.0 |
Control → Start conversion | Anforderung einer Messung (Steigende Flanke), nur nötig im Single Shot Modus. | 0x6000:04, 1 Bit | CW.3 |
Control → Mode | Aktueller Messmodus: | 0x6001:05, 4 Bit | CW.4 - CW.7 |
Control → Range | Aktueller Messbereich (unterer Wert jeweils für den AutorangeBetrieb maßgeblich) | 0x6001:09, 1 Byte | CW.8 - CW.15 |
Tab. 6: Prozessdaten 0x1600
Beispielprogramm: Zerlegung von WORDs in Bits.