Fahrwegsteuerung
Die Funktion Fahrwegsteuerung kann im CoE aktiviert werden. Dabei wird, ausgehend vom aktuellen Zählerstand, ein Ziel-Zählerstand über Rampen unter Beachtung einer maximalen Fahrfrequenz automatisch angefahren und die entsprechenden Pulse an den Ausgängen ausgegeben. Die Ausgabefrequenz verändert sich dabei je nach aktuellem Zählerstand.
Ist der vorgegebene Zählerstand erreicht, schaltet die Klemme die Frequenz auf null. Nur mit dieser Funktion „Fahrwegsteuerung“ ist die Ausgabe einer genauen Anzahl von Pulsen möglich.
Der Ablauf ist dabei durch mehrere Faktoren bestimmt, siehe Abbildung. Vor dem ersten Parametrieren der Fahrwegsteuerung empfiehlt sich ein CoE-Reset "Wiederherstellen des Auslieferungszustandes" um Seiteneffekte auszuschließen.
Der Ablauf und die zugehörigen Parameter sind in nachfolgender Tabelle aufgeführt, im erweiterten Betriebsmodus liegen einige der Parameter nicht mehr im CoE, sondern sind als Prozessdaten verlinkbar.
Phase | Normaler Betriebsmodus | Erweiterter Betriebsmodus |
|---|---|---|
Parametrierung | ||
Fahrwegsteuerung aktivieren | 0x8000:0A = TRUE | 0x8010:0A = TRUE |
Rampengrundfrequenz (10 Hz / 1 kHz) | 0x8000:07 = ? | 0x8010:07 = ? |
Rampenzeit-Konstante "steigend" t1 [Δ/sec] | 0x8001:04 = ? | 0x8010:14 = ? |
maximale Fahrfrequenz f1 | 0x8800:02 = ? | --- |
Rampenzeit-Konstante "fallend" t3 [Δ/sec] (> 1.1 * Rampenzeit-Konstante „steigend“ t1 s. Hinweis !) | 0x8001:05 = ? | 0x8010:15 = ? |
Auslauffrequenz f2 | 0x8001:07 = ? | 0x8010:17 = ? |
Fahrt | ||
Zielposition angeben | 0x8800:01 = ? | PDO: TargetCounterValue = ? |
Fahrt Start | CW.2 = TRUE | PDO: Control.GoCounter = TRUE |
maximale Fahrfrequenz f1 | --- | PDO: FrequencyValue <> 0 |
Rückstellen | ||
| CW.2 = FALSE | PDO: FrequencyValue = 0 |
|
| PDO: Control.GoCounter = FALSE |
 | Setzen von „GoCounter“ im erweiterten Betriebsmodus Bei Fahrwegsteuerung im erweiterten Betriebsmodus muss das Bit „Go counter“ gleichzeitig, oder vor Angabe des „Frequency value“ gesetzt sein. Ist das Bit „Go counter“ nicht gesetzt und der „Frequency value“ ist ungleich 0, dann ist die Fahrwegsteuerung nicht aktiv und es werden bereits Takte ausgegeben! |
| Rampenzeitkonstante Die "reale" Rampenzeit ergibt sich aus der Multiplikation der Rampengrundfrequenz mit der steigenden/fallenden Rampenzeitzeit-Konstante. |
| Steilheit der fallenden Rampe: Voraussetzung für eine exakte Zielfahrt ist, dass die Zeitkonstante der fallenden Rampe um einen gewissen Faktor größer ist als die der steigenden Rampe. Dies ist erforderlich, damit die Auslauf-Frequenz vor dem Endzählerstand erreicht wird und die Klemme nicht mit voller Geschwindigkeit auf den Endpunkt fährt. Erläuterung: |
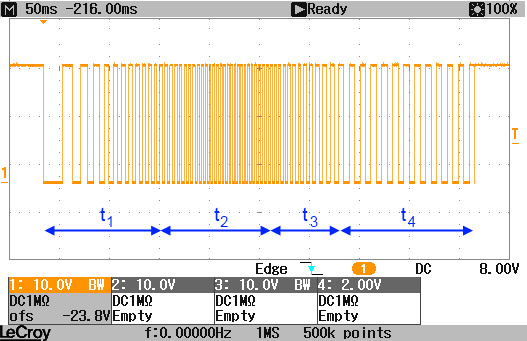
Beispiel einer Fahrwegrampe
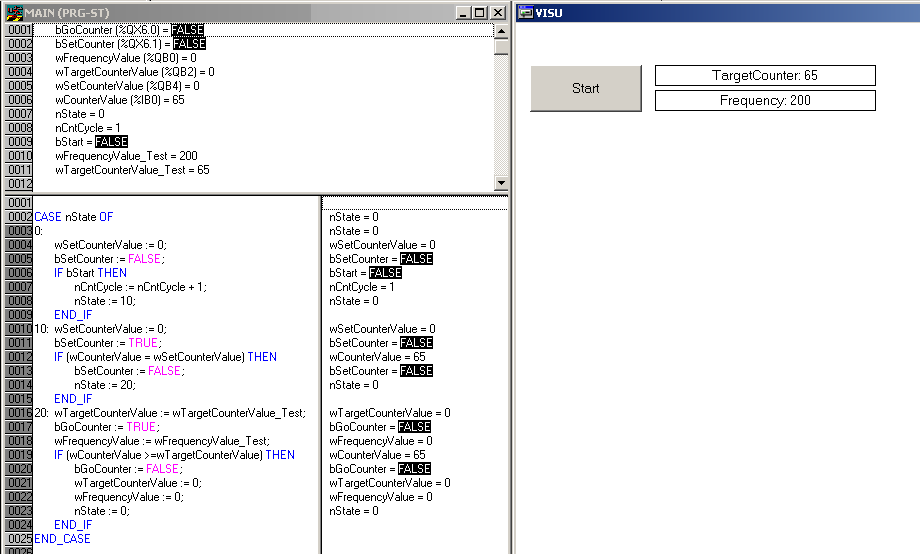
Als Beispiel sei hier die Aufzeichnung einer kurzen realen Fahrwegrampe gegeben, dazu das dazu verwendete Beispielprogramm: Download
Download
Die kurze Schrittkette setzt den aktuellen Zählerstand auf 0 zurück und fährt dann die Zielposition 65 an. Im System Manager-File wird die EL2521-xxxx über StartUp-Parameter auf die für dieses Beispiel passenden CoE-Werte gesetzt.
Das Resultat ist die Ausgabe einer variablen Frequenz bis auf die Zielposition 65.