Distributed Clocks Einstellungen
Grundlagen
Die EL2212 verfügt beim DC-Betrieb über eine Besonderheit: üblicherweise wird die DC-Einheit im ESC vom EtherCAT-Master verwaltet. Bei der EL2212 verwaltet jedoch der lokale Controller die Startzeit und setzt entsprechende Werte im ESC.
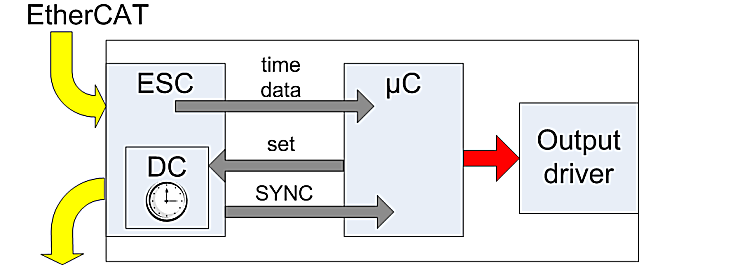 Abb.162: EL2212 DC-Schema
Abb.162: EL2212 DC-SchemaDer Controller (B) erhält Zeitstempel, Aktivierung und Sollzustände als normale Prozessdaten vom ESC (A). Er parametriert den ESC auf die nächste Startzeit. Beim angesetzten Zeitpunkt teilt dies der ESC dem Controller über das SYNC-Signal mit, dieser steuert dann entsprechend die Ausgangsstufen an.
Aus diesem Grund können im TwinCAT Systemmanager die entsprechenden DC-Einträge trotz DC-Modus nicht verändert werden, die EL2212 kann dennoch als ReferenceClock verwendet werden.
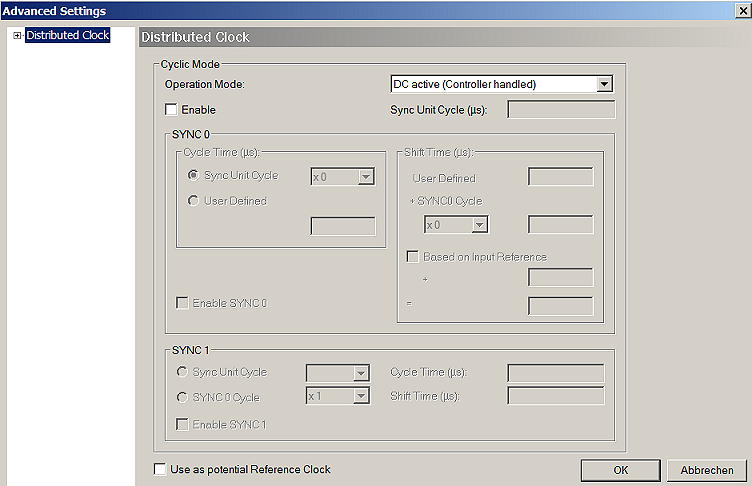 Abb.163: EL2212 DC-Einstellungen
Abb.163: EL2212 DC-EinstellungenErmittlung der aktuellen Distributed-Clocks-Zeit
Wird in einem PLC-Zyklus eine aktuelle Angabe über die Distributed-Clocks-Zeit benötigt, kann diese über eine Eingangsvariable des EtherCAT Masters verlinkt werden.
 | Funktionen für Datentypen mit 64 Bit Breite Zur Verarbeitung der 64 Bit Zahlen in Beckhoff TwinCAT stehen in der Library TcUtilities.lib eine Auswahl an Funktionen zur Verfügung. Hier sind längere Ausführungszeiten erforderlich als mit 32 Bit Standard-Datentypen. Ein Datentyp mit 64 Bit Breite ist in TcEthercat.lib als T_DCTIME oder in TcUtilities.lib als T_LARGE_INTEGER definiert. |
Der EtherCAT Master kann eine Kopie der aktuellen Distributed-Clock-Master-Clock anzeigen. Dazu ist im Gerät EtherCAT → Karteireiter EtherCAT → Erweiterte Einstellungen → Distributed Clocks die Einstellung "Show DC System Time (64bit)" zu aktivieren, (siehe entsprechende Abbildung).
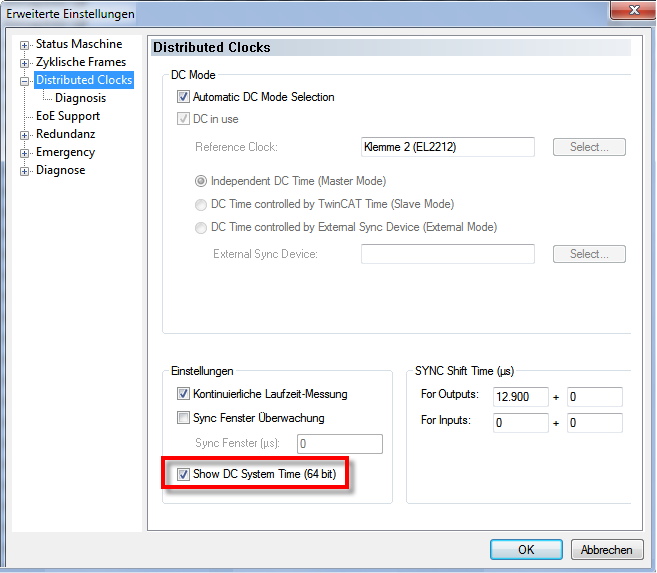 Abb.164: Aktivierung der Anzeige der Master-Distributed-Clock
Abb.164: Aktivierung der Anzeige der Master-Distributed-ClockDadurch stellt sich das Prozessabbild des EtherCAT Masters nun dar wie in der folgenden Abbildung:
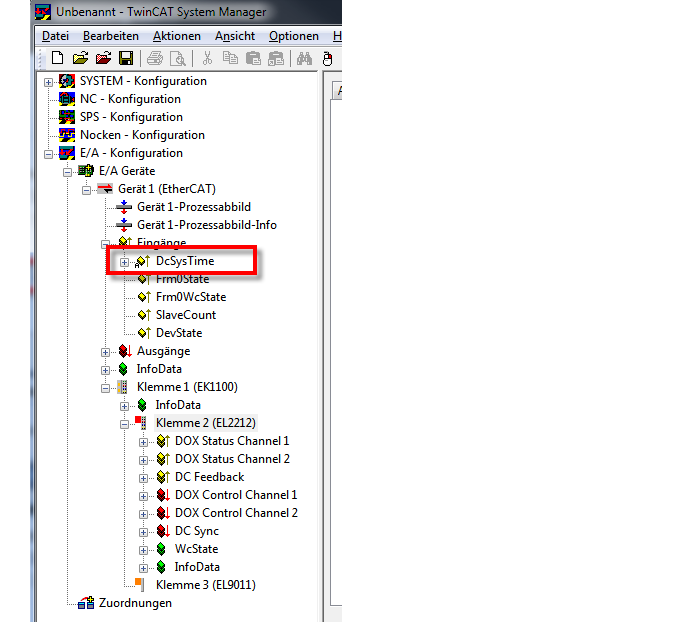 Abb.165: Erweitertes Prozessabbild des EtherCAT Masters
Abb.165: Erweitertes Prozessabbild des EtherCAT Masters | SYSTIME Der Wert DcSysTime des EtherCAT Masters ist mit Bedacht zu verwenden und soll nur als grobe Orientierung dienen, in welchem Zeitbereich (Größenordnung: 1-2 Task-Zyklen) sich das Distributed-Clocks-System gerade aufhält. |
Prozessdaten
Für den Betrieb der EL2212 ist die Aktivierung der dafür vorgesehenen Prozessdaten nötig.
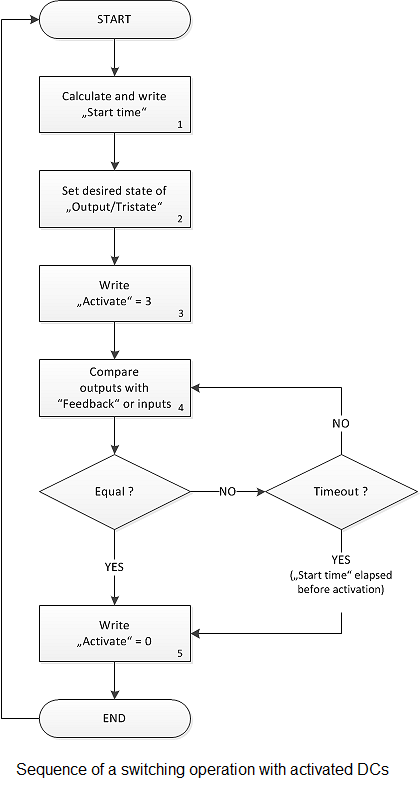
Beispiel eines Ablaufs mit aktivierten Distributed Clocks
Es ist folgender Ablauf bei der Anwendung der EL2212 mit aktivierten Distributed Clocks einzuhalten:
|
|
|
|
Es kann immer nur ein Schaltereignis je EL2212 definiert werden, das sich auf alle 4 Ausgangsvariablen Output und Tristate von Kanal 1 und 2 zugleich auswirkt. Je EtherCAT-Zyklus kann nur ein Schaltereignis definiert werden. Es ist zulässig, das Schreiben der Ausgangsdaten Soll-Ausgangszustände, Startzeit und Activate = 0 im gleichen EtherCAT-Zyklus durchzuführen. | |