Beispielprogramme
 | Verwendung der Beispielprogramme Dieses Dokument enthält exemplarische Anwendungen unserer Produkte für bestimmte Einsatzbereiche. Die hier dargestellten Anwendungshinweise beruhen auf den typischen Eigenschaften unserer Produkte und haben ausschließlich Beispielcharakter. Die mit diesem Dokument vermittelten Hinweise beziehen sich ausdrücklich nicht auf spezifische Anwendungsfälle, daher liegt es in der Verantwortung des Anwenders zu prüfen und zu entscheiden, ob das Produkt für den Einsatz in einem bestimmten Anwendungsbereich geeignet ist. Wir übernehmen keine Gewährleistung, dass der in diesem Dokument enthaltene Quellcode vollständig und richtig ist. Wir behalten uns jederzeit eine Änderung der Inhalte dieses Dokuments vor und übernehmen keine Haftung für Irrtümer und fehlenden Angaben. |
Beispiel 1: Frequenzmessung mit induktivem Sensor
 Download (Beispieldatei)
Download (Beispieldatei)
Daten:
- 1 ms Zykluszeit
- 1000 fach Oversampling auf beiden Kanälen
Anschlussschema:
Beispiel 2: Mitlesen des SENT‑Protokolls
Download TwinCAT 2 (Beispieldatei)
Download TwinCAT 3 (Beispieldatei)
- Erforderliche Hardware:
- EL1262-0050
- EL9505
- Eine Steuerung die mindestens 1 ms Taskzykluszeit erlaubt (IPC/ CX)
Anschlussschema:
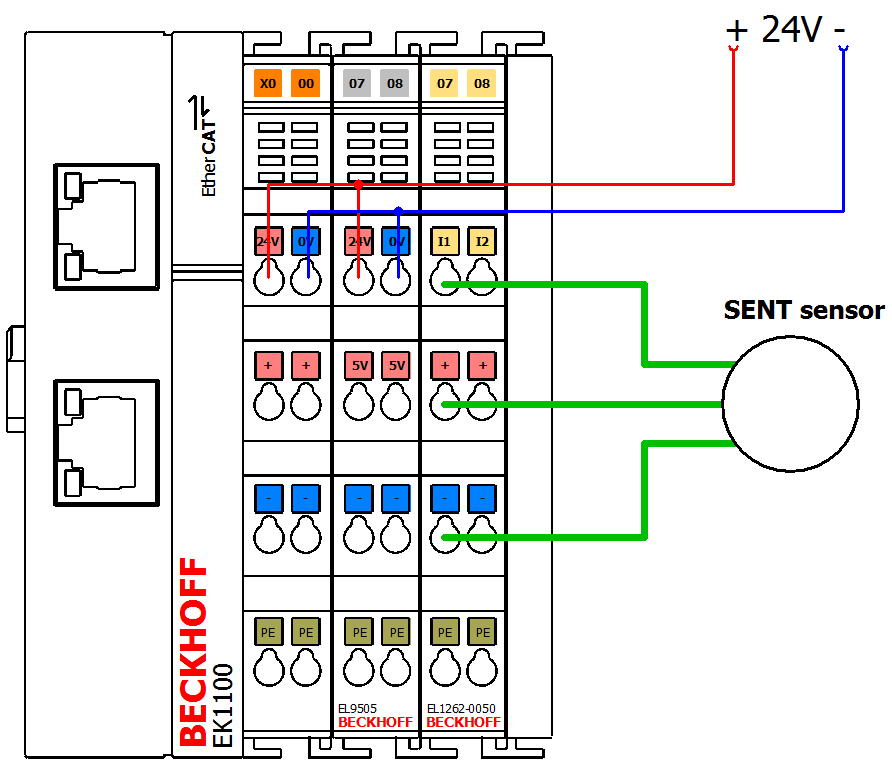
Die EL1262-0050 kann mit einem Oversampling von 1 µs arbeiten, so dass 1000 Bit in 1 ms zur Verfügung stehen.
Eine SENT Nachricht hat eine Auflösung von 3 µs pro Digit – daher ist eine Abtastung mit 1 µs für die Interpretation des Signals ausreichend.
Starten des Beispielprogramms
Die Applikationsbeispiele sind mit einem Prüfaufbau getestet und entsprechend beschrieben worden.
Etwaige Abweichungen bei der Einrichtung an realen Applikationen sind möglich.
Für den Prüfaufbau wurde folgende Hardware und Software verwendet:
- TwinCAT-Master-PC mit Betriebssystem Windows XP Professional SP 3, TwinCAT Version 2.10 (Build 1330) und INTEL PRO/100 VE Ethernet-Adapter
- Beckhoff EtherCAT Koppler EK1100, Klemmen EL1262 und EL9011
- Induktiver, positiv schaltender Näherungsschalter in 3-Leitertechnik, max. Schaltfrequenz: 3000 Hz
Vorgehensweise zum Starten des Programms
- Nach Klick auf den Download-Button speichern Sie das Zip-Archiv lokal auf ihrer Festplatte und entpacken die *.TSM (Konfigurationsdatei und *.PRO (PLC-Programmdatei) in einem temporären Arbeitsordner
- Start der *.TSM-Datei und *.PRO Datei; der TwinCAT-System Manger und die TwinCAT PLC öffnen sich
- Schließen Sie die Hardware entsprechend Verdrahtung für Beispielprogramm 1 an (anstatt des induktiven Näherungsschalters können auch andere elektrische oder mechanische Schaltelemente mit Schließerfunktion verwendet werden) und verbinden Sie den Ethernet-Adapter ihres PCs mit dem EtherCAT-Koppler (weitere Hinweise hierzu finden sie in den entsprechenden Kopplerhandbüchern)
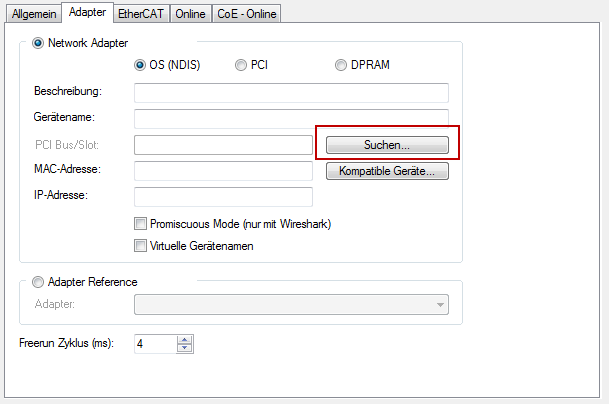
- Auswahl des lokalen Ethernet-Adapters (ggf. mit Echtzeit-Treiber) unter Systemkonfiguration, E/A - Konfiguration, E/A -Geräte, Gerät (EtherCAT); dann unter Karteireiter "Adapter", "Suchen..." den entsprechenden Adapter auswählen und bestätigen (siehe Abb. Suchen des Ethernet-Adapters + Auswahl und Bestätigung des Ethernet-Adapters)
Aktivierung der Konfiguration und bestätigen (Abb. Aktivierung der Konfiguration + Konfigurationsaktivierung bestätigen)
- Neue Variablenzuordnung bestätigen, Neustart im RUN-Modus (Abb. Variablenzuordnung erzeugen + Neustart TwinCAT im RUN-Modus)
Variablenzuordnung erzeugen 
Neustart TwinCAT im RUN-Modus - In der TwinCAT PLC unter Menü "Projekt" -> "Alles Übersetzen" das Projekt übersetzen (Abb. Projekt übersetzen)
Projekt übersetzen - In der TwinCAT PLC: Einloggen mit der Taste "F11", Laden des Programms bestätigen (Abb. Programmstart bestätigen), Start des Programms mit Taste "F5"
Beispiel 3: Lesen und Schreiben von TEDS Daten
Programmbeschreibung/ Funktion
In diesem Beispielprogramm wird ein Weg aufgezeigt wie die Daten eines separaten TEDS-Moduls gelesen/geschrieben werden können (TEDS = Transducer Electronic Data Sheet). Solche TEDS-Module sind am Markt für Nachrüstungen von Sensoren oder Aktoren verfügbar, um das Gerät nach der Installation zu identifizieren oder spezifische Daten auszulesen (Kalibrierung, Hersteller, ..). In diesem Beispiel wurde ein HBM TEDS 1−TEDS−BOARD−L, Stand 2018 verwendet.
Dieses Beispielprogramm ist ausdrücklich als Machbarkeitsdemonstration gedacht, ein Anspruch auf Interoperabilität mit beliebigen TEDS-Modulen besteht nicht. Es obliegt dem Anwender die hier formulierten Methoden auf seine eigene Implementation zu übertragen.
Diese Demonstration deckt nicht im Sensor integrierte TEDS-Module ab, die auf den Sensorleitungen kommunizieren. Dies ist so bei IEPE (Schwingung, Vibration) oder Dehnungsmessstreifen/Messbrücken üblich. Der Anschluss eines mit TEDS ausgerüsteten IEPE-Sensors ist u.a. an die Beckhoff ELM3602/ELM3604 Klemmen möglich.
Folgender Aufbau ist erforderlich:
[EK1100] + [EL2262] + [EL9505] + [EL1262-0050] + EL9011
Der Aufbau kann 2 TEDS-Module ansteuern, hier wird nur der 1-kanalige Betrieb aufgezeigt.
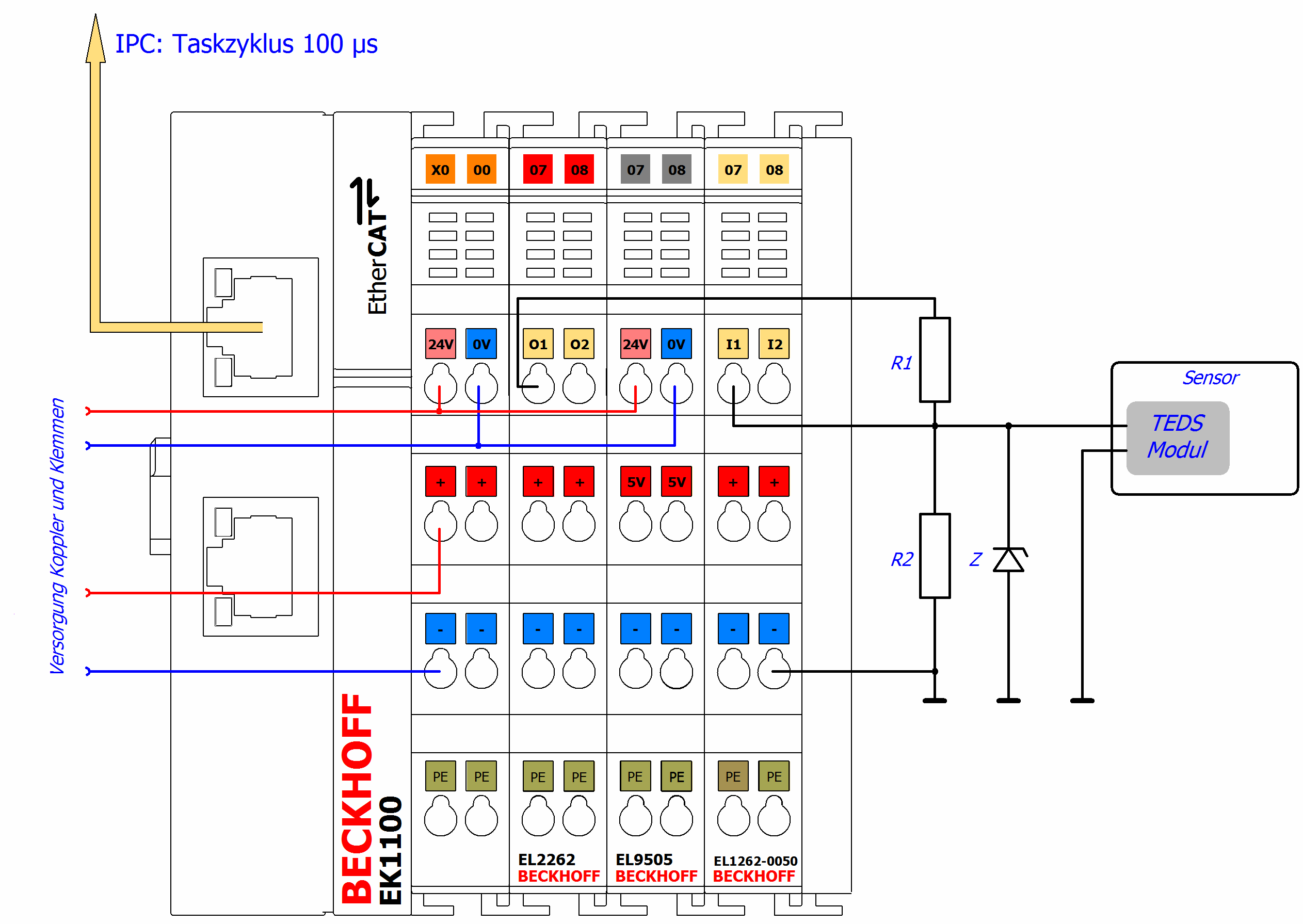
Der Spannungsteiler kann z.B. mit R1 = 2180 Ω (z.B. 680 Ω + 1500 Ω) und R2 = 680 Ω dimensioniert werden; die Z‑Diode mit Z = 5,1 V.
Hinweise zum Programm (Visualisierung)
Es ist zunächst die URN auszulesen (A). Nur damit sind weitere Funktionen anwendbar.
Das Programm ermittelt die URN für jedes Bit mit einer Neuinitialisierung des Moduls, da die Klemme für den Eingang einen zu großen Zeitversatz hervorruft (siehe Angabe oben rechts „Bit repeat count“).
Das Schreiben von Daten kann wahlweise durch Eingabe von (B) Hexadezimalwerten oder (C) einer Textzeichenkette (ASCII) erfolgen (Hexadezimalwerte müssen mit Leerzeichen getrennt in dem Textfeld vorliegen). Welche der beiden Eingaben für das Schreiben verwendet werden soll kann mit dem Kontrollkästchen „Write ASCII data“ (E) bestimmt werden:
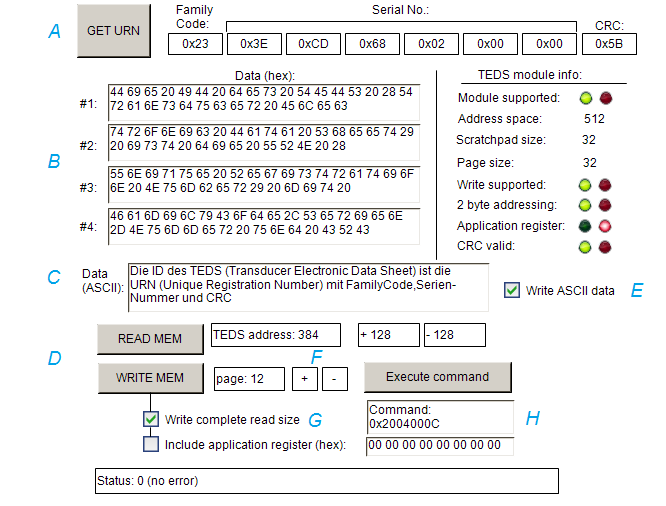
Die Grundlegende Funktion nach der Ermittelten URN ist (D) das Lesen (READ MEM) und Schreiben (WRITE MEM) von TEDS Daten. Durch absetzen eines solchen Kommandos wird in dem Textfeld (H) die zugehörige Kommandoanweisung erzeugt und kann auch verändert sowie dann mit „Execute command“ ausgeführt werden. Über +/- kann eine Änderung der Adresse erfolgen. Sowohl die Startadresse als auch "page" kann für Schreib-/ Lesezugriffe direkt eingegeben werden.
Die hexadezimal dargestellten Daten (B) des Textfeldes #1 bis #4 stellen je 32 Byte von insgesamt 128 Byte des Schreib/ Lesepuffers dar, wie er in dem Beispielprogramm konfiguriert ist. Wird das Kontrollkästchen „Complete read size“ (G) deaktiviert, wird i.d.R. nur der Inhalt vom Textfeld #1 für das Schreiben verwendet (es sei denn, das Modul besitzt Seitenspeicheradressen > 32 Byte). Dementsprechend werden von den ASCII Daten nur die ersten Zeichen geschrieben. In jedem Fall werden die Anzahl Bytes verwendet, wie seitens des TEDS Moduls für eine "page" konfiguriert ist. Zu beachten ist, dass das Modul i.d.R. nur Schreibzugriffe auf Adressen zulässt, die ein Vielfaches einer Seitenspeichergröße sind. Somit führt z.B. bei einer Seitenspeichergröße von 32 Bytes und der Eingabe einer Adresse 234 ein WRITE MEM Befehl zu einer Fehlermeldung 0x35 ‘writing fail’. Wird jedoch die Adresse 352 verwendet, ist das gültig und es kommt zu keinen Fehler.
Zudem erlaubt (G) „Include application register“ auch die Auswahl, ob das Applikationsregister beschrieben oder gelesen werden soll.
Download:
Programm
Informationen zur TEDS‑Funktionalität der ELM3xxx befinden sich im Kapitel
„ELM Features/ TEDS“.
Vorbereitungen zum Starten des Beispielprogramms (tnzip - Datei/ TwinCAT 3)
- Nach Klick auf den Download-Button speichern Sie das Zip-Archiv lokal auf ihrer Festplatte und entpacken die *.tnzip -Archivdatei in einem temporären Ordner.
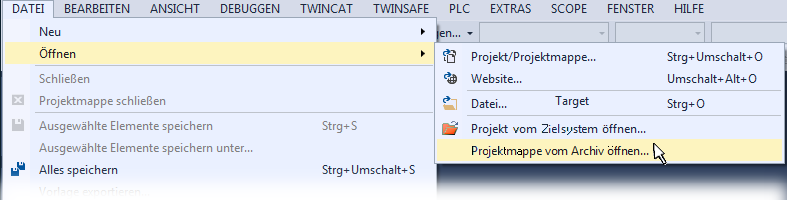
Öffnen des *. tnzip - Archives - Wählen Sie die zuvor entpackte .tnzip Datei (Beispielprogramm) aus.
- Ein weiteres Auswahlfenster öffnet sich: wählen nun Sie das Zielverzeichnis, wo das Projekt gespeichert werden soll.
- Die generelle Vorgehensweise für die Inbetriebnahme der PLC bzw. dem Start des Programms kann u. a. den Klemmen‑Dokumentationen oder der EtherCAT-Systemdokumentation entnommen werden.
- Das EtherCAT Gerät im Beispiel ist in der Regel. zuvor ihrem vorliegenden System bekannt zu machen. Verwenden Sie nach Auswahl des EtherCAT Gerätes im „Projektmappen-Explorer“ rechtsseitig den Karteireiter „Adapter“ und Klicken „Suchen...“:
Suche der bestehenden HW-Konfiguration zur bestehenden EtherCAT-Konfiguration - Überprüfen der NetId: der Karteireiter „EtherCAT“ des EtherCAT Gerätes zeigt die konfigurierte NetId:
 .
.
Diese muss mit den ersten vier Zahlenwerten mit der Projekt‑NetId des Zielsystems übereinstimmen. Die NetId des Projektes kann oben in einem Textfeld der TwinCAT-Umgebung eingesehen werden. Ein pull-down Menü kann durch einen Klick rechts im Textfeld geöffnet werden; dort ist zu jedem Rechnernamen eines Zielsystems die NetId in Klammern angegeben. - Ändern der NetId: mit einem Rechtsklick auf „Gerät EtherCAT“ im Projektmappen-Explorer öffnet sich das Kontextmenü, in dem „Ändern der NetId“ auszuwählen ist. Die ersten vier Zahlen der NetId des Projektes sind einzutragen. die beiden letzten Werte sind in der Regel 4.1.
Beispiel: - NetId des Projektes: myComputer (123.45.67.89.1.1)
- Eintrag per „Change NetId...“: 123.45.67.89.4.1