K‑Bus- und E‑Bus‑Schnittstelle
Auf der rechten Seite können wahlweise EtherCAT-Klemmen (E-Bus) oder Busklemmen (K-Bus) angereiht werden; der CX7293 erkennt in der Hochlaufphase automatisch, welches System angeschlossen ist.
K-Bus-Schnittstelle
Der CX7293 liest beim Scannen die Klemmentypen aus und legt sie im System Manager unter einem Buskoppler an.
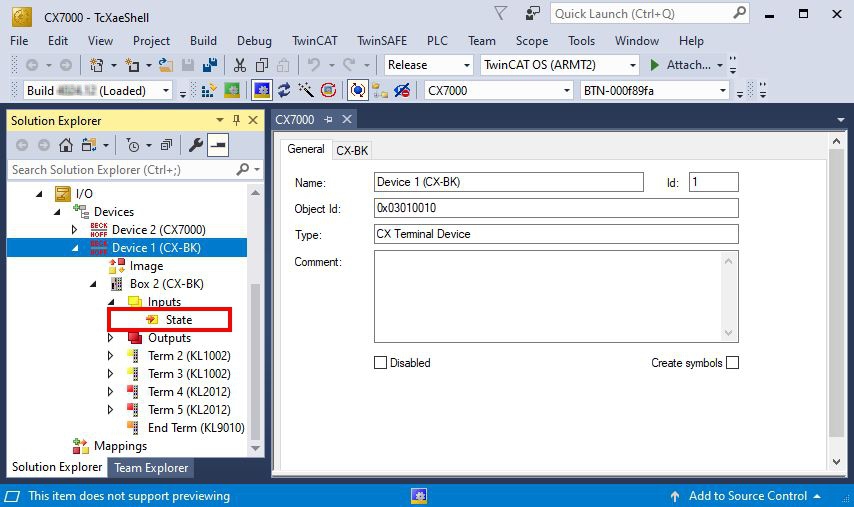 Abb.40: K-Bus-Schnittstelle eines CX7293 im TwinCAT System Manager.
Abb.40: K-Bus-Schnittstelle eines CX7293 im TwinCAT System Manager.Für die K-Bus-Diagnose gibt es in TwinCAT unter dem Buskoppler eine Status-Variable, die für Diagnosezwecke genutzt werden kann und den Status der K-Bus-Kommunikation anzeigt. Weitere Informationen finden Sie im Kapitel „Fehlerbehandlung und Diagnose“ unter K-Bus.
E-Bus-Schnittstelle (EtherCAT)
 | EoE (Ethernet over EtherCAT) EtherCAT-Slaves, die EoE für Kommunikation oder Konfiguration verwenden, werden auf dem CX7xxx derzeit nicht unterstützt. |
| Einschränkungen bei EtherCAT-Antrieben mit Distributed Clocks Die Embedded-PCs der Serie CX72xx eignen sich für den Einsatz mit EtherCAT‑Slaves, die Distributed Clocks verwenden oder zwingend voraussetzen. Der Einsatz von EtherCAT‑Antrieben ist jedoch nur eingeschränkt möglich, da für die CX72xx kein Motion‑Packet (TF5xxx) verfügbar ist. Für Anwendungen mit EtherCAT‑Antrieben verwenden Sie bitte die Baureihen CX82xx oder höher. |
Auch der Betrieb von EtherCAT-Klemmen und EtherCAT-Geräten ist am CX7293 möglich. Der CX7293 erkennt auch diese Klemmen beim Scannen automatisch, liest die Klemmentypen aus und legt sie im System Manager unter einem EtherCAT-Koppler an.
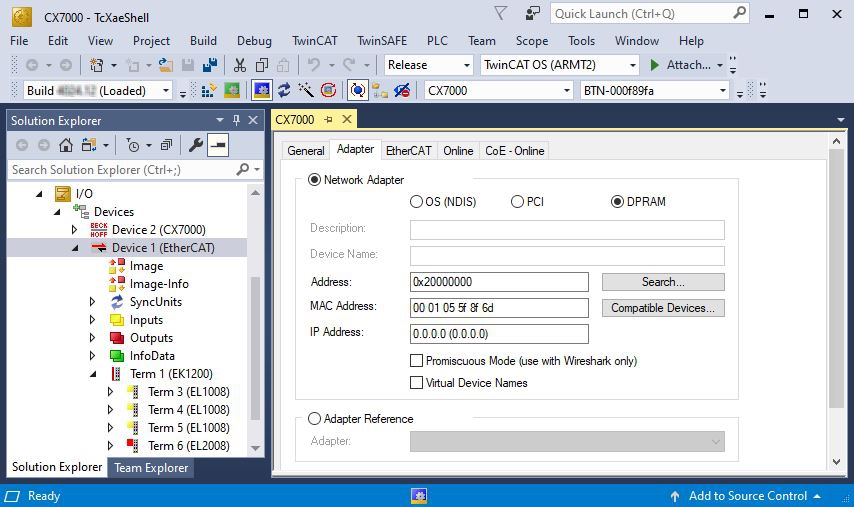 Abb.41: E-Bus-Schnittstelle eines CX7293 im TwinCAT System Manager.
Abb.41: E-Bus-Schnittstelle eines CX7293 im TwinCAT System Manager.Weitere Informationen zur Diagnose finden Sie im Kapitel „Fehlerbehandlung und Diagnose“ unter E-Bus.