K-Bus
Die angeschlossenen Busklemmen werden vom Netzteil auf Fehler überprüft. Die rote LED „K-BUS ERR“ ist aus, wenn keine Fehler vorhanden sind. Die rote LED „K-BUS ERR“ blinkt, wenn Fehler im Bereich der Busklemmen vorhanden sind.
Anzeige | LED | Bedeutung |
|---|---|---|
| Us 24V | Spannungsversorgung für CPU-Grundmodul. Die LED leuchtet grün bei korrekter Spannungsversorgung. |
Up 24V | Spannungsversorgung für Klemmenbus. Die LED leuchtet grün bei korrekter Spannungsversorgung. | |
K-BUS RUN | Diagnose K-Bus. Die grüne LED leuchtet, um den fehlerfreien Betrieb anzuzeigen. Fehlerfrei bedeutet, dass auch die Kommunikation mit dem Feldbussystem fehlerfrei läuft. | |
K-BUS ERR | Diagnose K-Bus. Die rote LED blinkt zur Fehleranzeige. Die rote LED blinkt mit zwei unterschiedlichen Frequenzen. |

Durch die Frequenz und Anzahl des Blinkens kann der Fehlercode und das Fehlerargument ermittelt werden. Ein Fehler wird durch die LED „K-BUS ERR“ in einer festen Reihenfolge angezeigt.
Reihenfolge | Bedeutung |
|---|---|
Schnelles Blinken | Start der Sequenz |
Erste langsame Sequenz | Fehlercode |
Keine Anzeige | Pause, die LED ist aus |
Zweite langsame Sequenz | Fehlerargument |
Zählen Sie, wie oft die rote LED K-BUS ERR blinkt, um den Fehlercode und das Fehlerargument zu ermitteln. Bei dem Fehlerargument zeigt die Anzahl der Impulse die Position der letzten Busklemme vor dem Fehler an. Passive Busklemmen, wie zum Beispiel eine Einspeiseklemme, werden nicht mitgezählt.
Fehlercode | Fehlerargument | Beschreibung | Abhilfe |
|---|---|---|---|
Ständiges, konstantes Blinken |
| EMV Probleme. |
|
3 Impulse | 0 | K-Bus-Kommandofehler. |
|
4 Impulse | 0 | K-Bus-Datenfehler, Bruchstelle hinter dem Netzteil. | Kontrollieren, ob die Busendklemme 9010 gesteckt ist. |
n | Bruchstelle hinter Busklemme n. | Prüfen, ob die Busklemme n+1 hinter dem Netzteil richtig gesteckt ist, gegebenenfalls tauschen. | |
5 Impulse | n | K-Bus-Fehler bei Register-Kommunikation mit Busklemme n. | Busklemme an Stelle n tauschen. |
6 Impulse | 0 | Fehler bei der Initialisierung. | Embedded-PC tauschen. |
1 | Interner Datenfehler. | Hardware-Reset des Embedded-PCs (aus - und wieder einschalten). | |
8 | Interner Datenfehler. | Hardware-Reset des Embedded-PCs (aus- und wieder einschalten). | |
7 Impulse | 0 | Prozessdatenlängen der Soll- und Ist-Konfiguration stimmen nicht überein. | Konfiguration und Busklemmen auf Konsistenz prüfen. |
Bei manchen Fehlern geht die LED „K-BUS ERR“ nicht aus, obwohl der Fehler beseitigt wurde. Schalten Sie die Spannungsversorgung für das Netzteil aus und wieder ein, damit die LED nach der Fehlerbeseitigung ausgeschaltet wird.
State-Variable
In TwinCAT gibt es unter dem Buskoppler die Variable State, für die K-Bus-Diagnose.
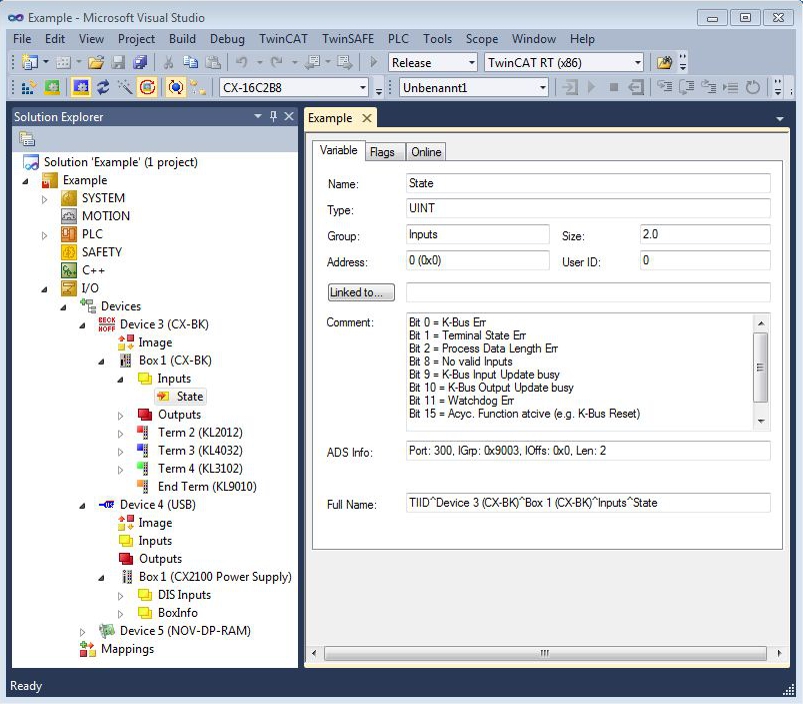 Abb.54: Status-Variable für Fehlerbehandlung und Diagnose unter TwinCAT.
Abb.54: Status-Variable für Fehlerbehandlung und Diagnose unter TwinCAT.Ist der Wert „0“ so arbeitet der K-Bus synchron und ohne Fehler. Sollte der Wert <> „0“ sein, kann ein Fehler vorliegen. Es kann aber auch nur ein Hinweis sein, das zum Beispiel der K-Bus-Zyklus länger dauert, als die verwendete Task. Damit ist er dann nicht mehr synchron zu der Task. Die Taskzeit sollte schneller als 100 ms sein. Wir empfehlen eine Taskzeit kleiner 50 ms. Typischerweise liegt die K-Bus-Update-Zeit zwischen einer und fünf ms.
Bit | Beschreibung |
|---|---|
Bit 0 | K-Bus-Fehler. |
Bit 1 | Klemmenkonfiguration hat sich seit dem Start geändert. |
Bit 2 | Prozessabbildlängen stimmen nicht überein. |
Bit 8 | (noch) keine gültigen Eingänge. |
Bit 9 | K-Bus ist im Inputupdate noch nicht fertig. |
Bit 10 | K-Bus ist im Output-Update noch nicht fertig. |
Bit 11 | Watchdog. |
Bit 15 | azyklische K-Bus-Funktion aktiv (z.B. K-Bus-Reset). |
Liegt ein K-Bus-Fehler vor, kann dieser über den Funktionsbaustein IOF_DeviceReset (in der TcIoFunctions.lib) zurückgesetzt werden.