EtherCAT-Synchronisation
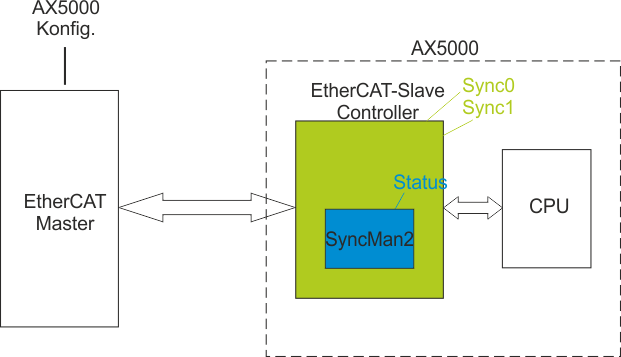
Vom EtherCAT-Master werden EtherCAT-Telegramme an alle angeschlossenen EtherCAT-Slaves gesendet. In jedem Slave ist ein EtherCAT-Slave Controller (ESC) implementiert. Um eine hohe Positionierpräzision als auch hohe Anforderungen an die Rundlaufeingenschaften erfüllen zu können, ist es im Bereich der Antriebstechnik notwendig, dass die Sollwertgenerierung im Master als auch alle angeschlossenen Antriebe zeitlich synchronisiert werden. Im EtherCAT-System stehen für diese Synchronisierungsaufgabe die sogenannten Distributed Clocks zur Verfügung. Details siehe www.ethercat.org. Die folgende Beschreibung behandelt ausschließlich die Synchronisation der Daten.
Weiterführende Informationen