Bei absoluten Messsystemen
Das AL8200-MES-Feedback gibt die Position nur absolut bezogen auf ein Polpaar an. Nach jedem Einschalten ist eine Referenzfahrt erforderlich. Der Kommutierungsoffset muss nur einmal ermittelt und gespeichert werden. Die Ermittlung des Kommutierungsoffsets erfolgt wie bei anderen absoluten Messsystemen. Das AL8200-MES-Feedback wird aus diesem Grund hier nicht gesondert beschrieben.
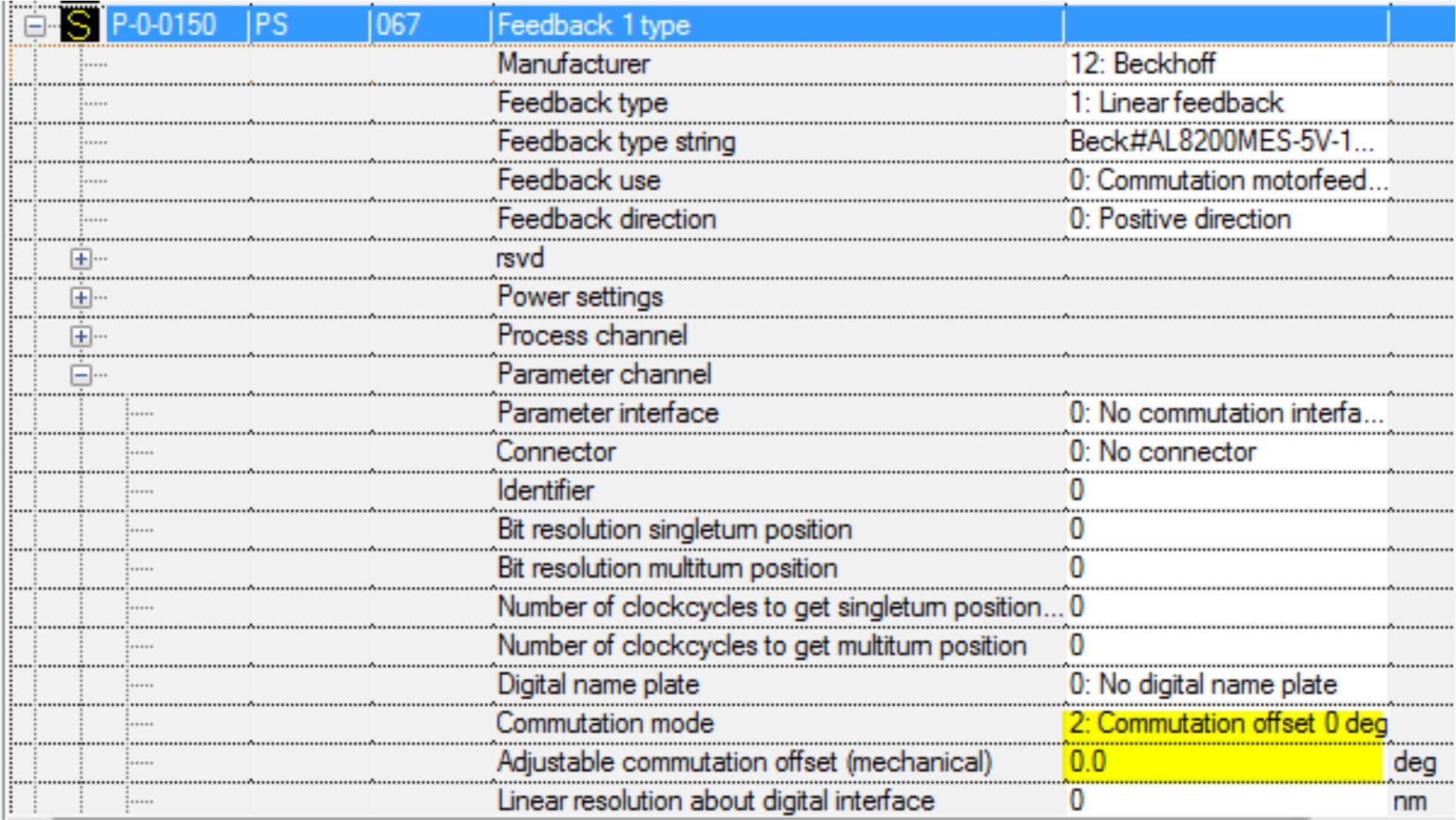
Stellen Sie im Parameter P-0-0150 die Werte für "Commutation Mode" und "Adjustable commutation Offset (mechanical)" ein (siehe unteres Bild).
Damit die Einstellungen übernommen werden, ist die Konfiguration zu aktivieren. Zum Einstellen des elektrischen Kommutierungsoffsets wird das Kommando P-0-0166 verwendet.
| |
Die Ausführung dieses Kommandos verursacht eine Bewegung des Motors! Warten Sie auf die Meldung „Succeeded to start the command“! |

Bei "Equal Directions" muss als Ergebnis "Yes" erscheinen.
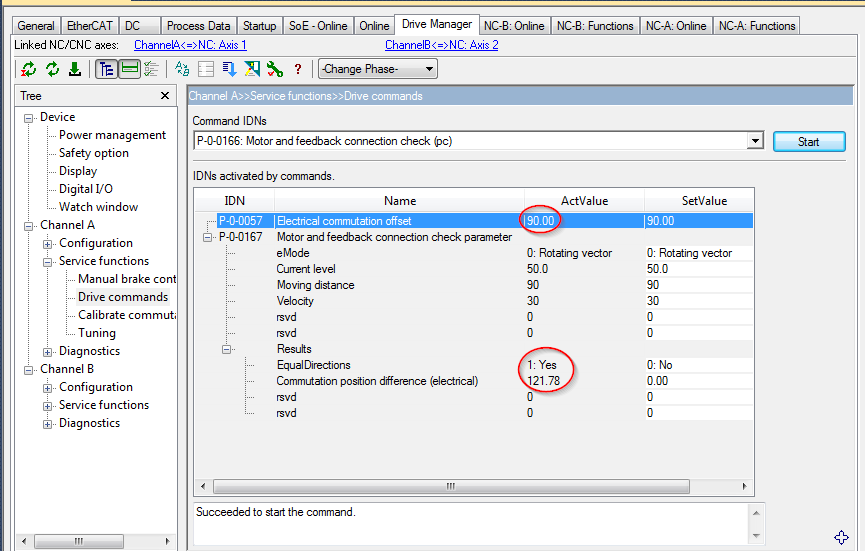
Lesen Sie den Wert bei "Commutation position difference" aus. Ziehen Sie diesen von dem Wert in P-0-0057 "Electrical commutation offset" ab. Ist das Ergebnis positiv, ist dies der neue Wert für P-0-0057. Ist das Ergebnis negativ, addieren Sie 360° hinzu.
Beispiel:
90° - 121,78° = -31,78°
-31,78° + 360° = 328,22°
Das Ergebnis ist der neue Wert für P-0-0057 "Electrical commutation offset". Tragen Sie den Wert bei SetValue ein und bestätigen mit <Enter>. Die dann erscheinende Meldung bestätigen Sie mit Ja (unteres Bild).
Durch Drücken des Download-Knopfes (roter Pfeil → unteres Bild) wird der neue Wert sofort aktiv.
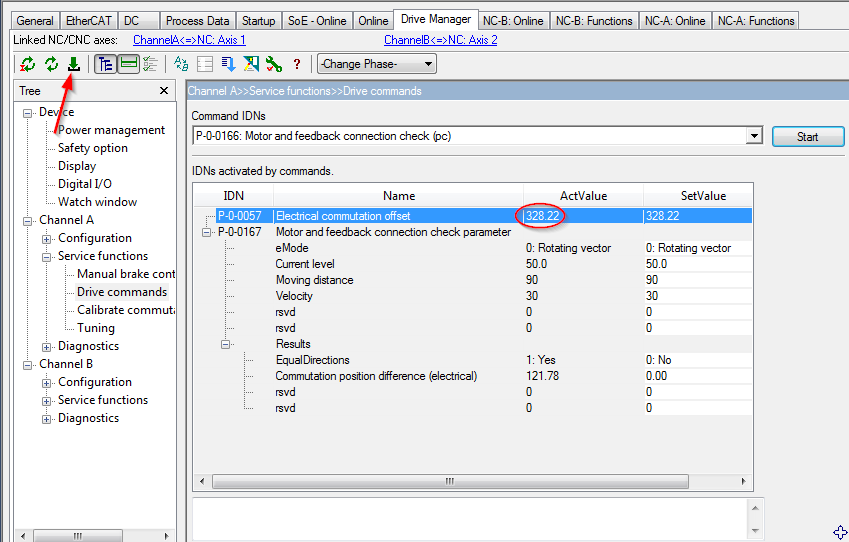
Der Wert wird nach erfolgtem Download in der Einstellung "ActValue" angezeigt. Führen Sie das Kommando P-0-0166 erneut aus!
Der Wert für "Commutation position difference" sollte jetzt im Bereich:
355 ... 360 = 0 ... 5 liegen.
Wird dieser Wert angezeigt, haben Sie die Kommutierungsfindung erfolgreich abgeschlossen!
Der Offsetwert ist mit dem Download-Knopf bereits in die Startup-Liste übernommen worden.
Falls der Wert außerhalb des Bereichs liegt, kann P-0-0057 nach der beschriebenen Methode erneut korrigiert werden. Wenn kein sinnvoller Wert gefunden wird, sollte die ausführlichere Überprüfung mit Hilfe des Kommandos P-0-0166 ausgeführt werden. Bitte beachten Sie hierzu das Kapitel: „Überprüfen der Motorphasen und des Encoderzählsinn“.
 | Weiterführende Informationen finden Sie in den Parametern: P-0-0057, P-0-0150 und P-0-0166. |