Geräte implementieren
Um Ihre Antriebskomponenten in das TwinCAT Projekt zu implementieren, können diese manuell oder über den automatischen Scanvorgang eingefügt werden. Es empfiehlt sich jedoch zu scannen, da dadurch alle Antriebskomponenten direkt in das Projekt eingefügt werden.
TwinCAT im ConfigMode
Um den Scanvorgang zu starten, muss sich TwinCAT im ConfigMode befinden. Der ConfigMode ist einer von mehreren TwinCAT Zuständen, der sich anhand des kleinen Zahnradsymbols in der Statusleiste am unteren Bildschirmrand erkennen lässt. Ist das Symbol blau gefärbt, ist der ConfigMode aktiviert und das Scannen kann gestartet werden. Wenn das Symbol grün oder rot gefärbt ist, gehen Sie folgendermaßen vor:
| Das blaue Zahnradsymbol in der Menüleiste anklicken und „System“ auswählen. |
| Den Zustandswechsel mit OK bestätigen |
| TwinCAT wechselt in den ConfigMode und das Symbol in der Statusleiste färbt sich blau |

 →
→ 
→ TwinCAT befindet sich im ConfigMode.
Scannen des Antriebs starten
Wenn sowohl das richtige Zielsystem als auch der ConfigMode aktiviert sind, kann das Scannen gestartet werden.
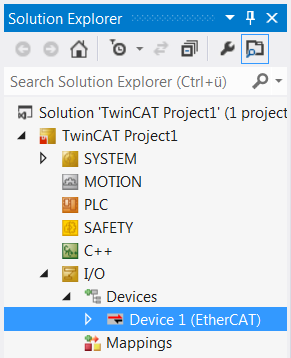
| Im Solution Explorer unter I/O → Devices auswählen Das Schaltsymbol Scan in der Symbolleiste betätigen oder mit der rechten Maustaste auf Devices klicken und Scan auswählen | ||
| Das Hinweisfenster mit OK schließen | ||
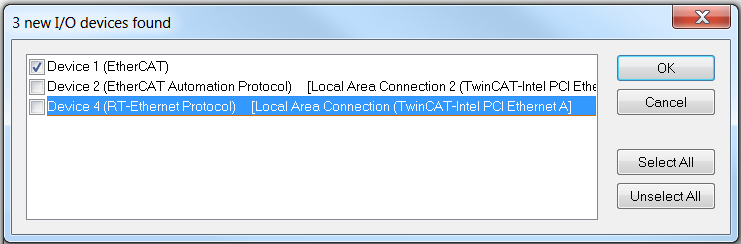
| Die Geräte auswählen, die dem TwinCAT Projekt automatisch hinzugefügt werden sollen Die Auswahl mit OK abschließen | ||
| . | Die darauffolgende Abfrage mit Yes bestätigen Wird die Abfrage verneint, wird der Scanvorgang abgebrochen Die Meldung über einen gefundenen Servoverstärker bzw. einer Servoklemme kann einen speziellen Scanvorgang für Motoren auslösen. Dieser würde die elektronischen Typenschilder der Motoren auslesen und die Daten direkt in den TCDriveManager eintragen. | |

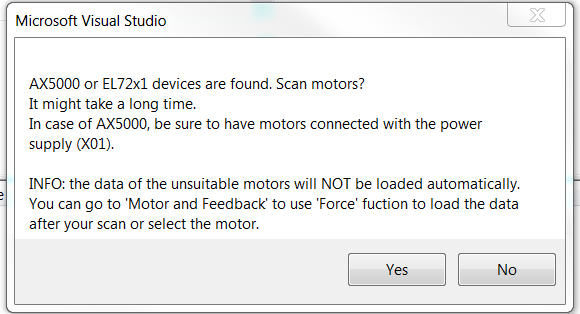
| Die Abfrage mit Yes bestätigen, um die elektronischen Typenschilder auszulesen Warten Sie, bis das Scannen abgeschlossen ist | ||
|
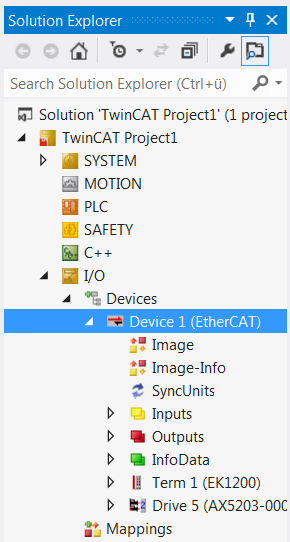
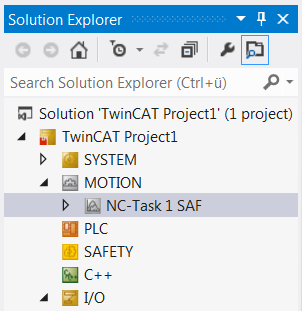
| Um die Motoren über das TwinCAT Projekt zu steuern, muss eine NC- oder CNC-Achskonfiguration angelegt werden. Die Abfrage mit Yes bestätigen, um eine NC-Achskonfiguration anzulegen Durch die automatische Erstellung der Achskonfiguration wird zu jedem gefundenen Motor eine Achse hinzugefügt und entsprechend verknüpft. Die angelegte NC-Achskonfiguration wird im Solution Explorer angezeigt. | |
|
| Die Aufforderung, den Free Run zu aktivieren, mit No ablehnen | |
→Der Antrieb ist vollständig in das TwinCAT Projekt implementiert.
 | Der Modus Free Run Der Free Run Modus dient zur Synchronisation der I/O Komponenten und Antriebe, wenn keine NC vorhanden ist. Beim Betrieb mit NC wird eine triggernde Task aktiviert, welche die I/O Komponenten und Antriebe synchronisiert. Diese ist im Betrieb ohne NC nicht vorhanden. Im Modus Free Run wird eine virtuelle Task erzeugt, die es ermöglicht, die o.g. Komponenten zu synchronisieren. Weiterhin werden die I/O-Daten ausgelesen. |
Befindet sich das System im Modus Free Run, blinken in der Statusleiste das blaue und rote Symbol abwechselnd. |
| → ← →
|
|
