IOF_SER_GetPhase
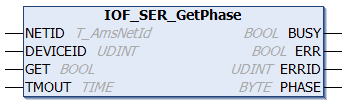
The IOF_SER_GetPhase function block determines the current communication phase on the SERCOS ring. The communication phases can have values from 0 to 4.
 Inputs
Inputs
VAR_INPUT
NETID : T_AmsNetId;
DEVICEID : UDINT;
GET : BOOL;
TMOUT : TIME := DEFAULT_ADS_TIMEOUT;
END_VARName | Type | Description |
|---|---|---|
NETID | T_AmsNetId | The network address of the TwinCAT computer on which the ADS command is to be executed can be specified here. For the local computer an empty string may be specified. |
DEVICEID | UDINT | The DeviceId is used to specify the SERCOS master whose communication phase is to be determined. The device IDs are specified by the TwinCAT system during the hardware configuration. |
GET | BOOL | The function block is enabled by a positive edge at this input. |
TMOUT | TIME | Specifies the time-out period that must not be exceeded when the command is executed. |
 Outputs
Outputs
VAR_OUTPUT
BUSY : BOOL;
ERR : BOOL;
ERRID : UDINT;
PHASE : BYTE;
END_VARName | Type | Description |
|---|---|---|
BUSY | BOOL | When the function block is enabled, this output is set and remains set until a feedback is received. |
ERR | BOOL | If an error should occur during the transfer of the command, then this output is set once the BUSY output was reset. |
ERRID | UDINT | Returns the ADS error number when the ERR output is set. |
PHASE | BYTE | The current communication phase in the SERCOS ring. |
Requirements
|
Development environment |
Target platform |
IO hardware |
PLC libraries to be integrated (category group) |
|---|---|---|---|
|
TwinCAT v3.1.0 |
PC (x86) |
Sercans SCS-P ISA; Sercans SCS-P PCI; |
Tc2_IoFunctions (IO) |