Selection of the operation mode
By selecting the operation mode, you determine the controlled variable and the controller structure.
Controlled variable | Operation mode via CoE-Online Index 0x7010:03 "Modes of operation" | Predefined PDO via process data |
|---|---|---|
Position 1) | CSP | Predefined PDO "Position |
Velocity | CSV | Predefined PDO "Velocity": |
Torque | CST | Predefined PDO "Torque": |
Torque and | CSTCA | Predefined PDO "Torque" + PDO 0x1603 "DRV Commutation angle" |
Drive Motion Control | DMC | 64-bit control: 32-bit control |
1) You can also control the position with the CSV operation mode. See chapter CSV (velocity control). The control performance is better with CSP, however. | ||
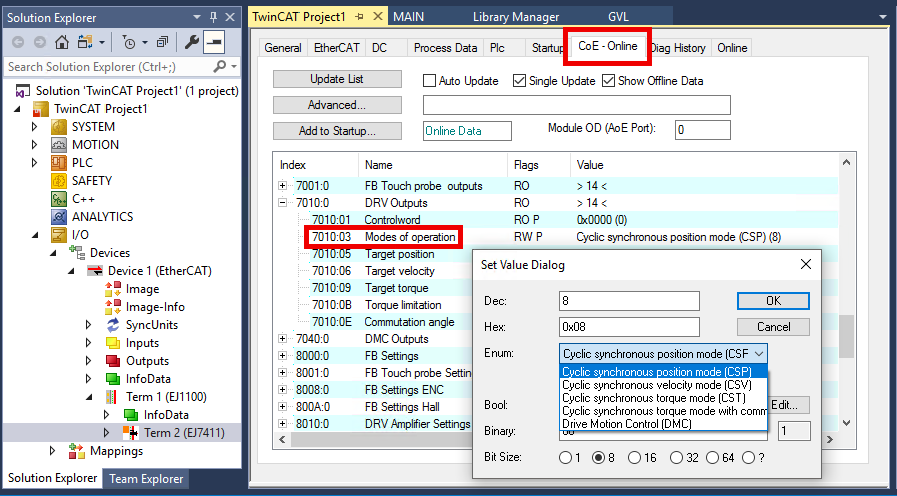
Setting the operation mode via the CoE directory
Proceed as follows to set the selected operation mode:
Notice | |
Risk of damage to the device! We strongly advise not to change settings in the CoE objects while the axis is active, since this could impair the control. |
- 1. Click on the "CoE - Online" tab.
- 2. Set the operation mode in parameter 0x7010:03 "Modes of operation".
Notice | |
Changes in the CoE directory (CAN over EtherCAT), program access When using/manipulating the CoE parameters observe the general CoE notes in chapter "CoE interface" of the EtherCAT system documentation:
|
Selection of the process data via Predefined PDO Assignment
- 1. Click the "Process Data" tab.
- 2. Click "Predefined PDO Assignment".
- 3. Select the correct entry according to the following table.
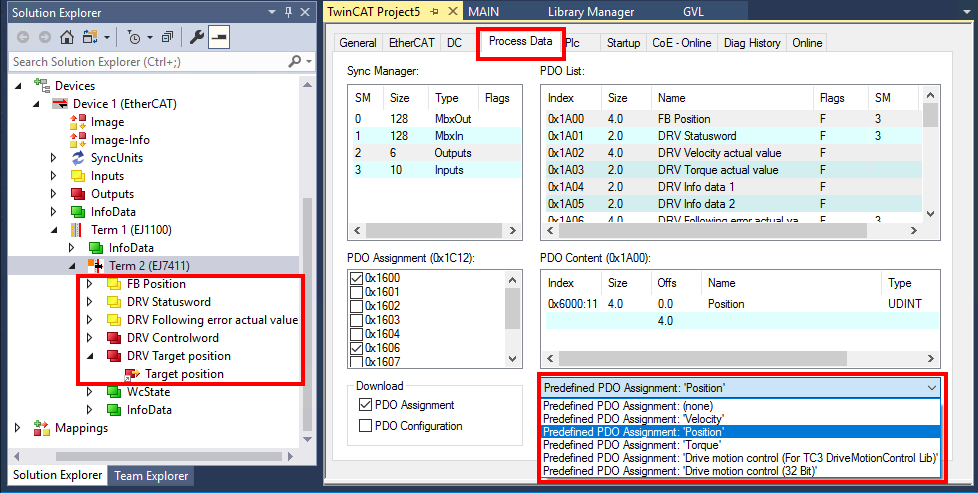
- The selected process data are displayed in the tree structure.
Operation mode | "Predefined PDO Assignment" | ||
|---|---|---|---|
Name | Inputs (SM3) | Outputs (SM2) | |
"Position": | 0x1A00 "FB Position" | 0x1600 "DRV Controlword" | |
"Velocity": | 0x1A00 "FB Position" | 0x1600 "DRV Controlword" | |
"Torque": | 0x1A00 "FB Position" | 0x1600 "DRV Controlword" | |
"Torque" | |||
"Drive motion control (For TC3 DrivemMotionControl)" | 0x1A40 "DMC Inputs" | 0x1640 "DMC Outputs" | |
"Drive motion control (32-bit)" | 0x1A41 "DMC Inputs 32 Bit" | 0x1641 "DMC Outputs 32 Bit" | |