Schnellstart
Inhaltsverzeichnis |
|---|
Default Einstellung EL3692
Beide Kanäle der EL3692 befinden sich standardmäßig im Zustand
- CoE-Betrieb (Parametereinstellung über CoE)
- alternierender Messbetrieb
- 4-Leiter-Betrieb
- Autorange für die Messbereiche
- Prozessdaten: fixpoint und float
- Filtereinstellung 10 Hz (ca. 100 ms Wandlungszeit)
- Wartezeit 10 (200 bzw. 500 ms in Abh. vom Messbereich)
 | Zeitverhalten im Autorange-Betrieb Die EL3692 schaltet im Standardbetrieb zur Messung zwischen den beiden Kanälen hin- und her. Je nach anhängendem Messobjekt kann es dabei zu erheblichen Umladeeffekten kommen, die innerhalb der vorgegebenen Messdauer ggf. nicht beendet werden können. Eventuell wird dann im Autorange-Betrieb nach größeren Widerstandsänderungen mit daraus folgend nötiger Messbereichsänderung nicht der korrekte Messbereich erreicht, dies beeinträchtigt die Messgenauigkeit. |
Schritt-für-Schritt Anleitung
Zur Inbetriebnahme mit o.g. Einstellungen ist wie folgt vorzugehen:
- Montieren Sie den EL3692 wie im Kapitel Montage und Verdrahtung beschrieben.
- Aktivieren Sie den EtherCAT Master und starten Sie die Klemme in den OP-Zustand. In den Input-Variablen muss die EL3692 State=OP und WC=0 liefern.
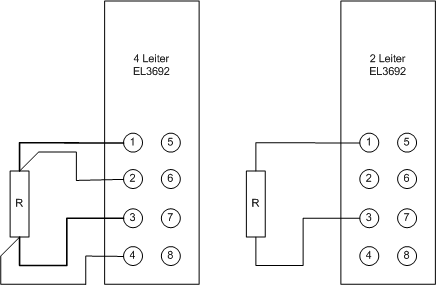
- Schließen Sie den Widerstand laut folgender Abbildung im 2-Leiter oder im 4-Leiter Modus an
- In TwinCAT stellt sich die EL3692 wie folgt dar (Kanal 1 rot gruppiert, Kanal 2 blau gruppiert):
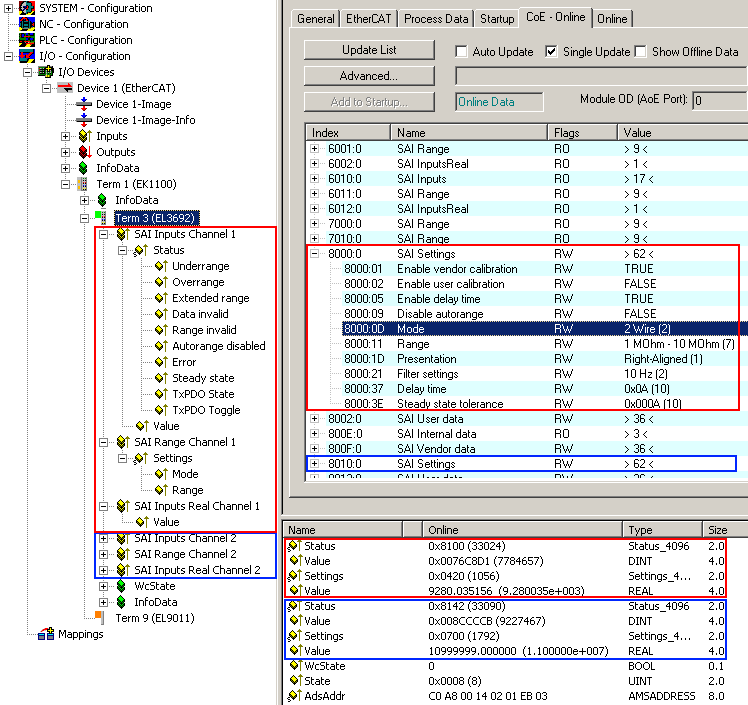
- Die EL3692 gibt für jeden Kanal aus:
- SAI Inputs: aktuellen Status
- SAI Inputs: aktueller Messwert 32 Bit ganzzahlig, messbereichsabhängig
- SAI Range:: aktueller Range (automatische Messbereichswahl!)
- SAI Inputs Real: aktueller Messwert 32 Bit PLC-Festkomma-Float, messbereichsunabhängig, skalierte Darstellung
Es sind die Hinweise zu den Prozessdaten zu beachten.
5. für 2-Leiter Messung: Im CoE, Eintrag 0x80n0:0D ist der Mode auf 2 stellen (n steht für den verwendeten Kanal: 0= Kanal 1, 1= Kanal2).
Falls erforderlich, kann die EL3692 durch den CoE-Reset in die Werkseinstellung zurückgesetzt werden.
| Darstellung Messwert Die EL3692 kann den aktuellen kanalweisen Messwert je nach PDO-Auswahl „predefined PDO assignment“ in 2 unterschiedlichen Arten ausgeben. Als „fixpoint“ und „float“. Siehe folgende Erklärung: |
- als 32 Bit ganzzahliger, messbereichsabhängiger Wert, mit 24 Bit Inhalt „fixpoint“
Erklärung:
Die 9 Messbereiche der EL3692 sind nach ihrem empfohlenen Einsatzbereich benannt z. B. 1 .. 10 Ω, messen aber alle bis 0 Ohm hinunter. Der Wertebereich von Value erstreckt sich somit über x0 .. x00 7F FF FF für jeden Messbereich, mit „x0 = 0 Ohm“ und "x00 7F FF FF ≈ nomineller Messbereichsendwert".
Allerdings wird der nominelle Messbereich im Autorangebetrieb um bis zu 10% überschritten, um die Messbereichsumschaltung zu gewährleisten, sog. "erweiterter Messbereich".
Die Angaben im Status sind zu beachten.
Im Folgenden ein Beispiel für den Messbereich „1 .. 10 Ω“:
Eingangswiderstand |
| 32 Bit Value | Interpretation | Statusbits |
|---|---|---|---|---|
0 Ω |
| x00 00 00 00 | 0 | Extended Range = 0 Overrange = 0 |
10 Ω | Nomineller Messbereichsendwert | x00 7F FF FF | 8.388.607 | Extended Range = 1 "erweiterter Messbereich" Overrange = 0 |
10 .. 11 Ω | erweiterter Messbereich |
|
| Extended Range = 1 Overrange = 0 |
> 11 Ω |
| x00 8C CC CB | 9.227.467 | Extended Range = 0 Overrange = 1 |
Es ist zu beachten, daß der relative Messfehler am unteren Ende des Messbereichs sehr groß wird. Bei Messung im Bereich < 10% vom nom. Messbereichsendwert ist deshalb der nächst niedrigere Messbereich zu benutzen. Die Autorange-Funktion arbeitet entsprechend.
- als 32 Bit Festkomma-Float-Wert mit Mantisse und Exponent, messbereichsunabhängig "float"
Erklärung:
Diese 32-Bit-Variable kann nach IEC61131 direkt mit einer FLOAT-Variable der PLC verlinkt werden. Die Umrechnung erfolgt in der EL3692, der Anwender muss keine messbereichsabhängige Umrechnung mehr vornehmen.
Siehe weitere Hinweise auf der Seite Prozessdaten
6. Kontrollieren Sie, ob die Bereichswechselfunktion im Autorange-Betrieb für alle vorgesehenen Prüflinge korrekt arbeitet. Dies gilt insbesondere für den Fall, dass am ersten und zweiten Kanal Prüflinge mit sehr unterschiedlichen Widerstands/Kapazitäts/Induktivitätswerten angeschlossen werden (> 3 Messbereiche). Ein unbelegter Kanal wird im Messbereich 7 (1 MΩ .. 10 MΩ ) messen.
Durch eine Verlängerung der kanalweisen Wartezeit (CoE 0x80n0:31) kann dies kompensiert werden, sollte die automatische Einstellung nicht ausreichen. Die Wartezeit sollte in dem Kanal schrittweise vergrößert werden, der nicht die optimale Bereichsauswahl vornimmt.
7. Im Betrieb ist der kanalweise Prozesswert durch die Überwachung der Statusvariablen Error, DataInvalid und SteadyState auf Gültigkeit zu prüfen.
Für weitere Konfiguration in TwinCAT können Sie im Kapitel Prozessdaten und im Kapitel Wichtige CoE Einträge nachschlagen.