Soft Drive Cyclic I/O Variables
The soft drive contains parameters that can be cyclically updated from any other TwinCAT cyclic process; these values are typically linked to the PLC.
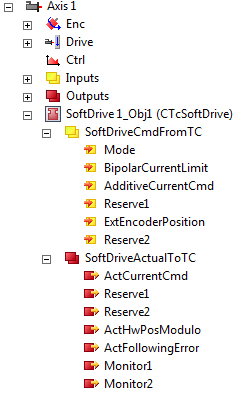
| The feedback Values (Soft Drive Actual To TC) are available and simply need to be linked. Reserve 1, Reserve 2, Monitor 1 and Monitor 2 are for future use. The Actual Current Command, Actual HwPosModulo and ActFollowingErrror are available every 250us XTS cycle and can be linked to track the actual values. (Do not use these values for Scoping and Tuning, use the SdSoftDriveScope values. |
For the input parameters into the Soft Drive Mode: switch the use of the other command values and the Soft Drive operation mode
BipolarCurrentLimit: set an additional cyclic bipolar current limit in milli Amps. AdditiveCurrentCmd: set an additional cyclic feedforward current in per mill of the rated motor current or set the used current command in OPMODE CST or CSTA. ExtEncoderPosition: use an position from another encoder (or mover) as position feedback for control loop and commutation the scaling and offset could be set by the parameter „SoftDriveExternalEncoder“ this parameter should only be used after consultation with Beckhoff Automation as dead times and other factors must be determined. Take care when enabling and adjusting these values enabling a mode takes place immediately (250us) same for restrictions on the current. Switching from a restriction of 5N to unrestricted (100N) will happen immediately and the mover will jump. Ramping the values up or down may be necessary. | |