Adjusting final Kp and Kp_standstill
Step 1 | Step 2 |
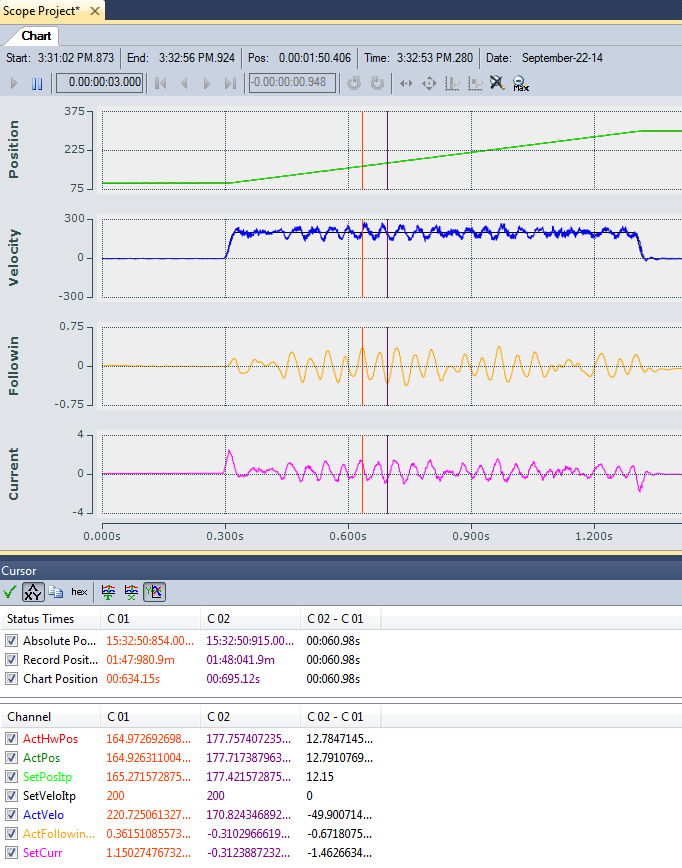
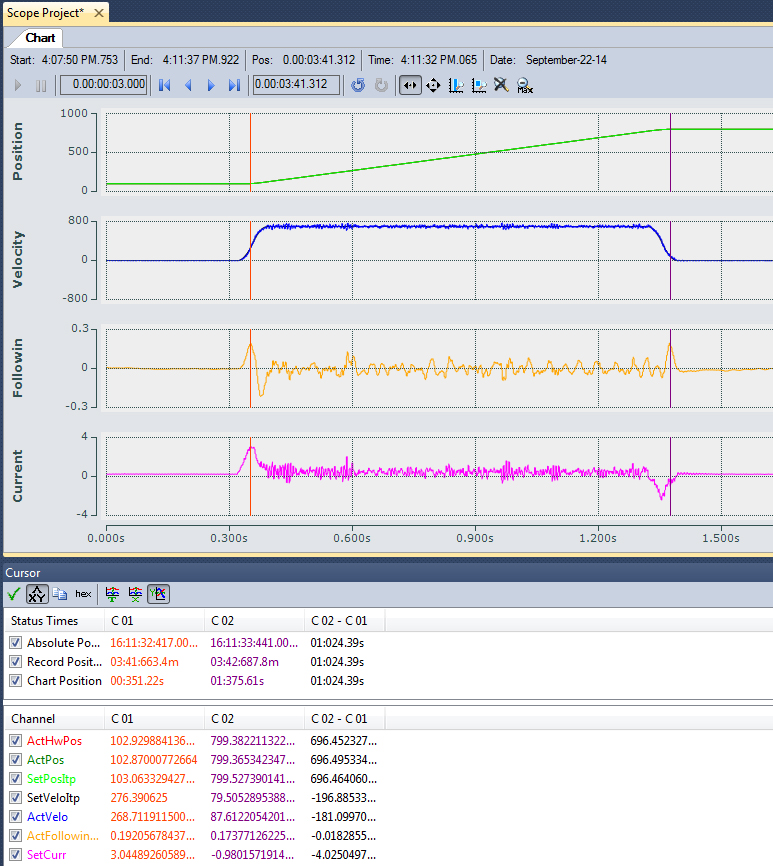
The Kp moving and Kp standstill can now be adjusted so that the Following error is as small as possible throughout the move. Adjusting the Position Control Loop Kp too high will result in a system that attempt to react too strongly. | Well-Tuned System: On acceleration and deceleration a maximum of 0.19mm lag distance is reached. This system is quite well tuned on the straight sections. Kp is required in order to attain and hold position the position control loop Kp should never be below 0.01 or position control can never be attained. Position Control Kp_standstill and Velocity Control Kp_standstill are critical in having the mover hold position. The mover must be able to hold position even when disturbed by an external force. Velocity Control Kp_standstill should never be less than 0.02 and Kp_standstill should never be lower than 0.01. |
|
|
If the mover requires tuning values outside the recommended settings, the mover will not be able to attain and hold position and the mechanical construction of the tooling mounted to the mover should be re-designed. Pay particular attention to Project Planning guide which describes the physics and effects of various loads on the mover. | |