Setting the KpAccFFT Value
Step 1 |
|
| If the KpAccFFT is to low then the mover is not given enough initial current to accelerate fast enough and the mover lags behind its set position. If the KpAccFFT is too high, too much extra current is applied resulting in a faster acceleration than the commanded acceleration. |
|
|
Step 2 | Step 3 |
Initial adjustment of the KpAccFFT
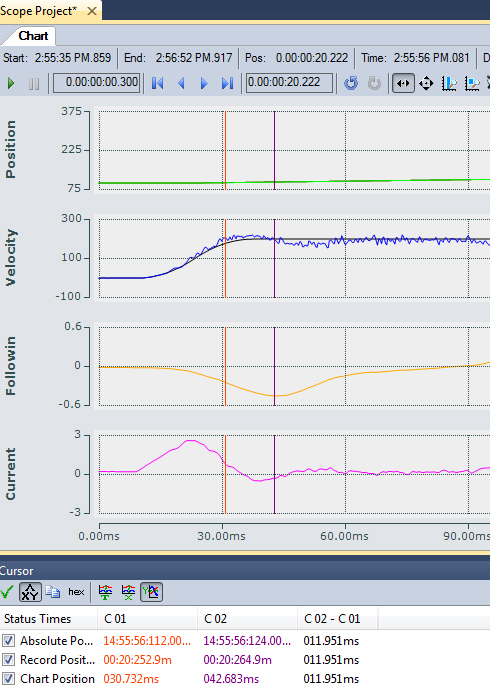
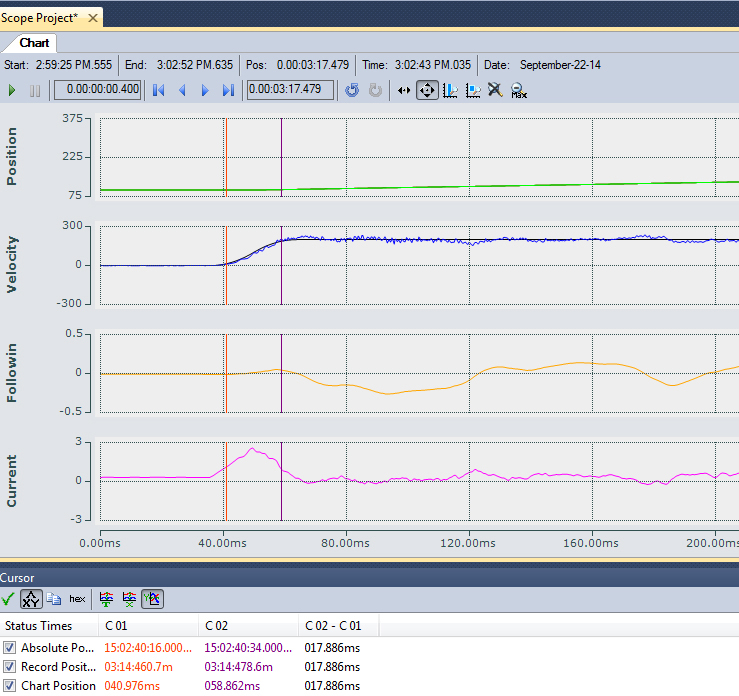
If KpAccFFT is too high the mover will accelerate faster than expected and the mover will be ahead of its commanded position. Here we see the following error is negative the mover is moving too fast. This may not seem to be a bad thing however it will be repeated on the stopping side, resulting in the mover stopping before the target position is reached and then having to accelerate once again to come into position, this results in a long settling time. | KpAccFFT should be adjusted so that the mover has nearly zero (but not negative) lag during the acceleration phase. With KpAccFFT set correctly there is very little lag built up during the acceleration/deceleration phases. Depending on the mover/track it may be that the mover decelerates faster than it accelerates. In that case KpAccFFT may need to be set in such a way that there is some lag during acceleration, but the mover decelerates properly without stopping prior to reaching the target position. |
|
|