Setting Initial Position Control Values
Step 1 | Step 2 |
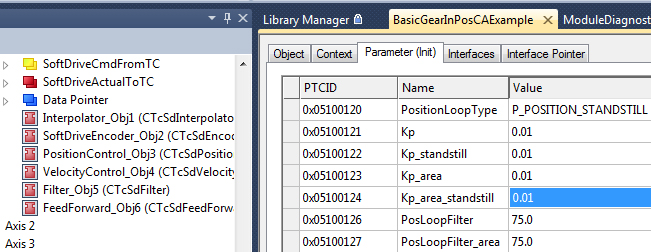
With this reversing sequence selected, the positon control loop can now be tuned and initial values can be written into the Position Control Kp Standstill and Kp values. With the Control Loop parameters enabled with low values: Kp= 0.01 Kp_Standstill = 0.01
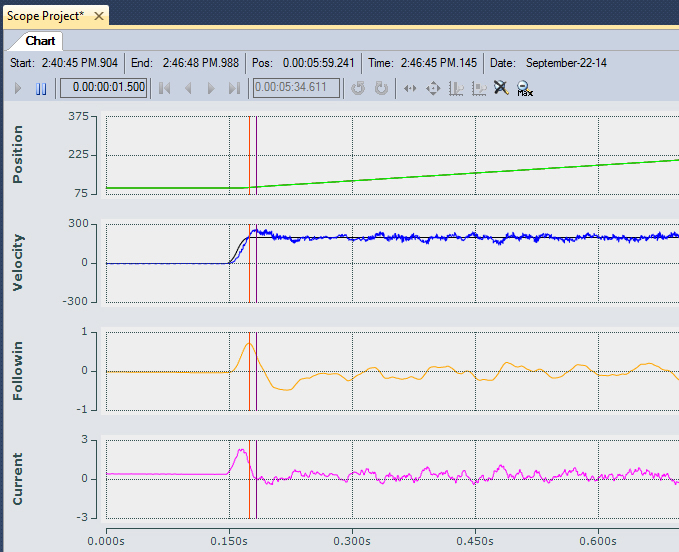
| The mover used in this example has a mass of approximately 650g and as such it builds up a significant lag during the acceleration and deceleration phases. The slope of the velocity actual velocity matches the commanded velocity however is just slightly late. The mover can achieve the requested acceleration however it should start earlier. This can be overcome with some acceleration feed forward. This is set in the Feed Forward object. |
|
|