Adjusting Tn for the Velocity Control Loop
To make up the last bit of difference between Command Velocity and Actual Velocity an integral is necessary. Kp is simply a multiplication factor between actual velocity and set velocity. This integrates the difference between the actual velocity and set velocity over time. A long integral time constant (Tn) will cause the error will be integrated over a longer time resulting in a slower softer response. Reducing the Tn will give the system a faster harder response. The target is to have the velocity overshoot by about 10% and settle quickly. | |
|
|
Step 1 | Step 2 |
With Tn set too low we see the response is very hard, the target velocity is reached within 30ms but the velocity continues to increase overshooting the target velocity of 200mm/s by 75% and reaches a maximum of 350mm/s | Next Step, increase Tn With Tn too high, the mover reaches the commanded velocity but it takes over 50ms to get and there is still a definite oscillation above and below the commanded velocity even after 100ms |
|
|


Step 3 | Step 4 |
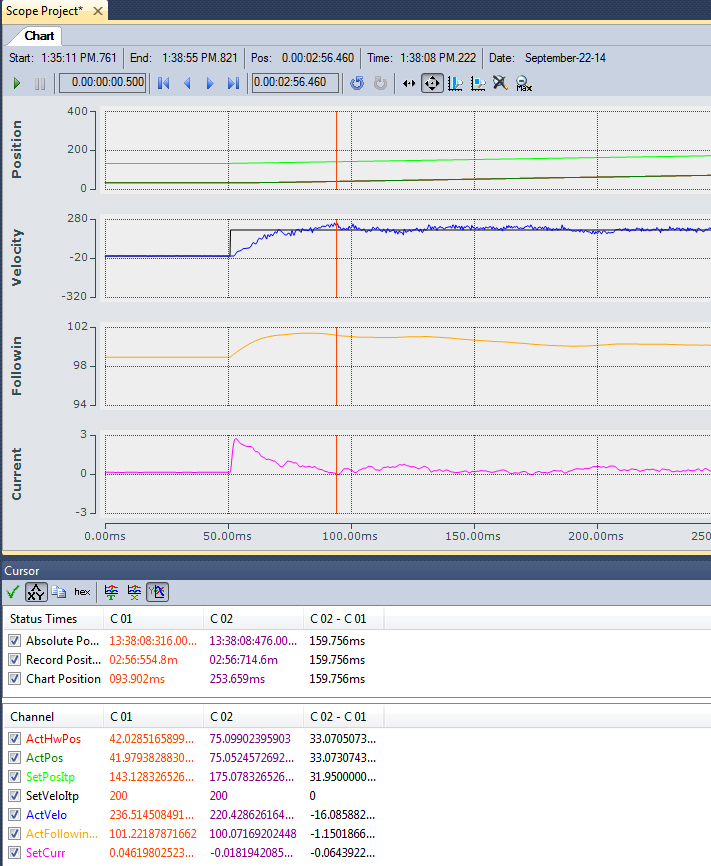
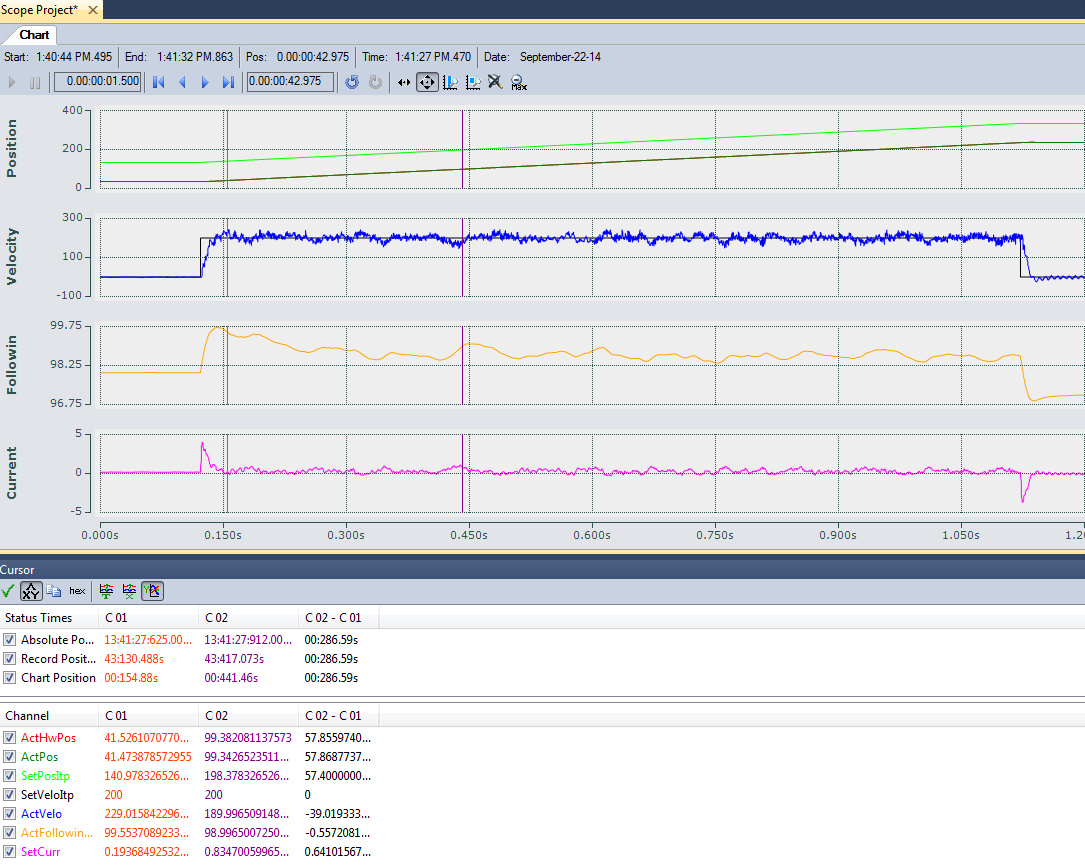
Correctly selecting the Tn Results in a proper response The overshoot is slightly higher than 10% but the requested velocity is initially reached within 40ms and holds a constant velocity. | Kp can now be increased or decreased slightly to give us a final velocity tuning |
|
|
With the velocity loop tuned the Position control loop can now be tuned.
 | Important! Return the Operation Mode to Operation Mode 8 prior to continuing. |
| The Operation mode of the axis must be set back to Mode 8 to allow Position Control |