Tuning the Velocity Kp Value
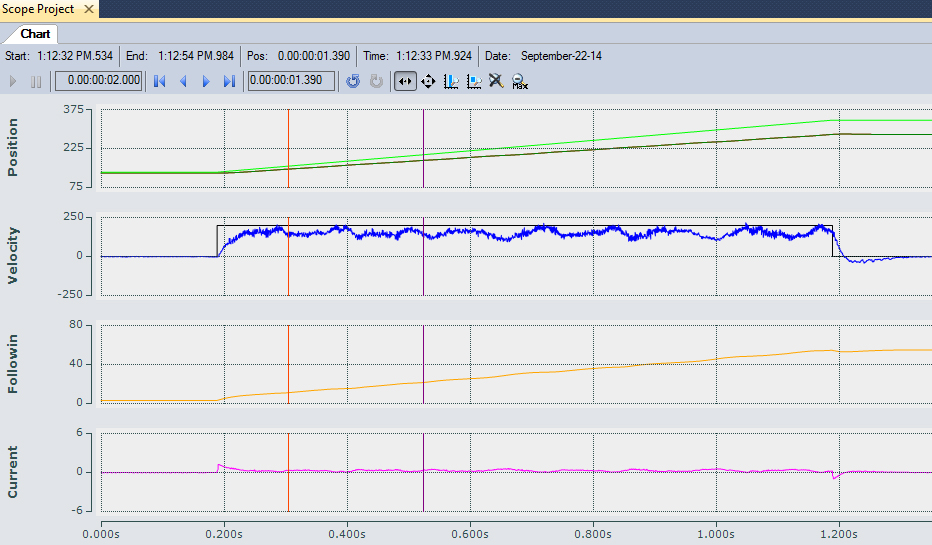
First set Tn to 0 With Tn Set to zero the mover is no longer looking at the error over time and the velocity will be a little low. Kp can now be initially adjusted so that it brings the velocity to 80-90% of the commanded velocity. Kp should never be set below 0.025. | In this picture you see that the value of Kp is too high. |
|
|
|
|
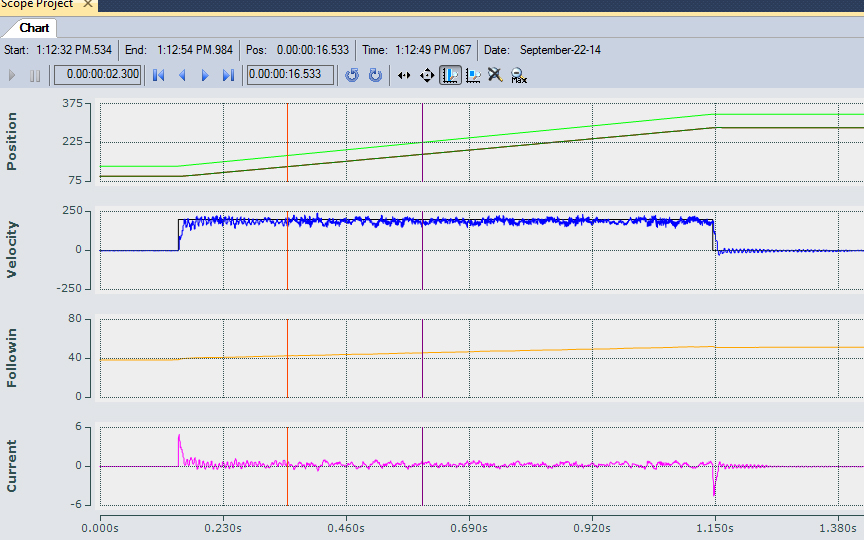
Kp set to reach ~90% of the commanded velocity | |
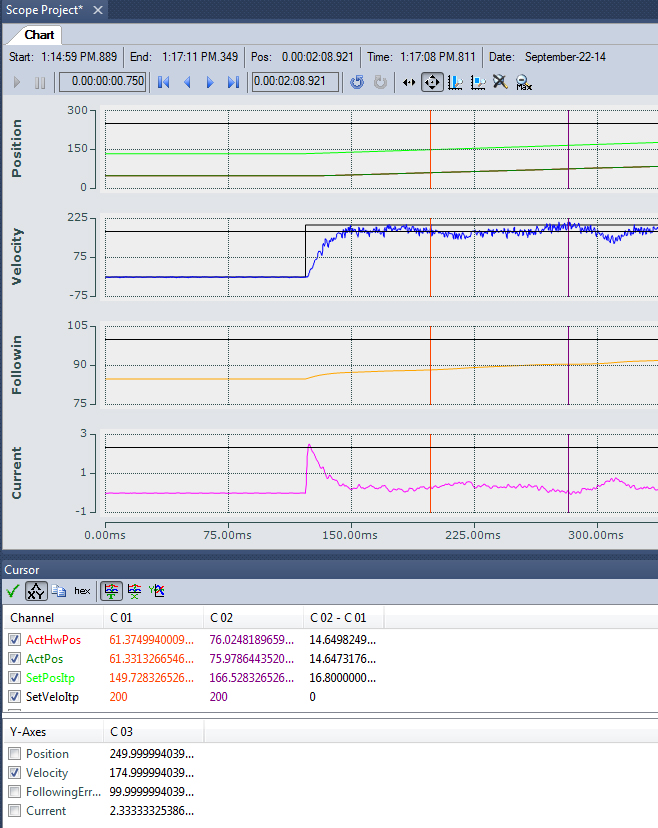
| In this case a Kp of 0.45 has been selected |