Tuning the Velocity Control Loop
Step 1 | Step 2 |
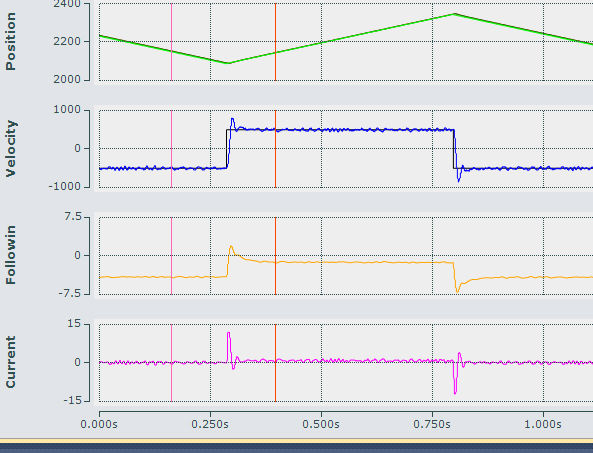
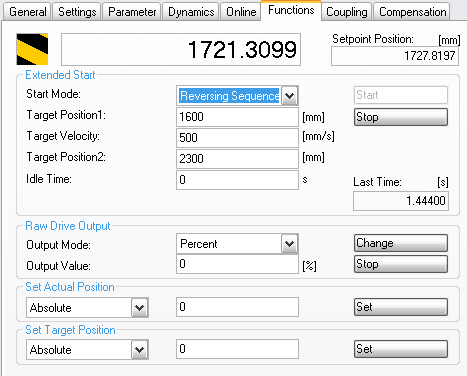
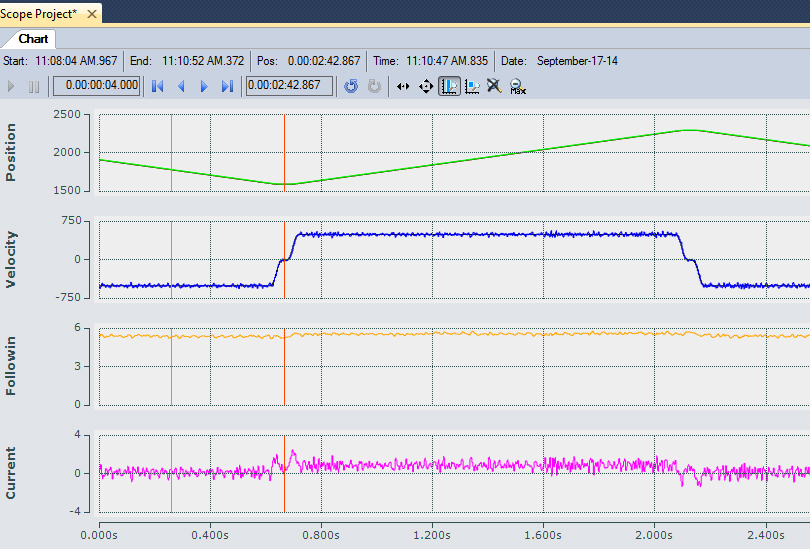
Once the oscillations of the system are removed and the position control loop disabled, the velocity loop can be tuned. The goal of tuning the velocity loop is to get the mover to respond as quickly and accurately as possible to new velocity commands. The Velocity Command should change as quickly as possible. To that end, the dynamics on the mover should be set very high and a reversing sequence employed moving the mover back and forth. If a reversing sequence command is to be used the Jerk, Acceleration, and Deceleration should be set impossibly high. | The above command results in the following graph. |
|
|
This accel and decel values are a bit low. To see how the system behaves the system must be asked to do something it cannot do. The Jerk and Accel and Decel should be set very, very high >100,000 for accel and >400,000,000 for Jerk. The best option is to use the Velo Step Sequence if possible. The velocity step sequence simply issues a command velocity with an instantaneous acceleration. This is particularly helpful when attempting to tune the velocity loop. However the velocity step command does not have a target position, simply a driving time. As such care must be taken that the mover being tuned does not crash into something. | |
 | Important! While standard motor tuning techniques can and should be used for the XTS, it must be noted that the velocity ripple of an XTS mover is much higher than a standard rotary motor. |
Step 3 | |
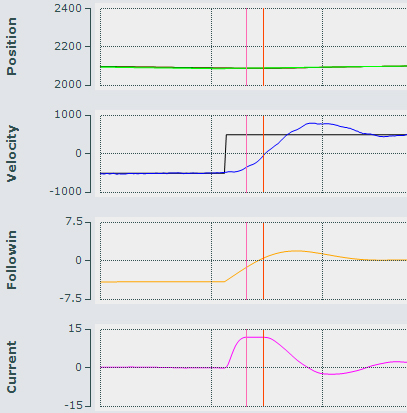
| Here the a velo step sequence is implanted with a 0.75 second driving time |
This reversing sequence has acceleration/deceleration and jerk parameters high enough to perform a tuning of velocity loop but a Velo Step Sequence is always preferred as it has an Impulse Acceleration.
| Important! The Velo Step Sequence should be used whenever possible |
| |
Risk of personal injury! When using the Velo Step Sequence. The mover is given a commanded velocity for a given time. There is no position control, as such care must be taken that there is nothing for the mover to crash into. |

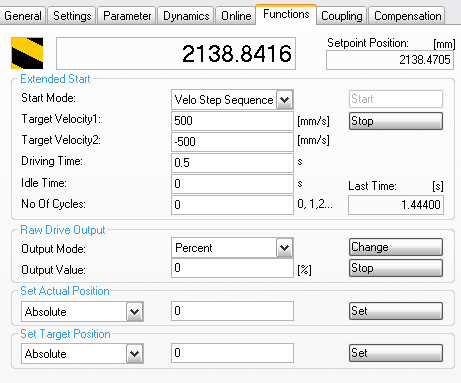
Velo Step Sequence command |
|
Step 4
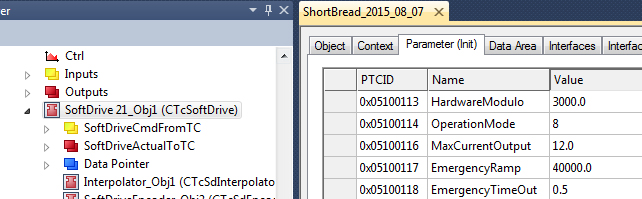
| Step 5 When using the Velo Step Sequence the Operation Mode of the Axis also has to be changed from Operation Mode 8 (Cyclic Synchronous Position Mode) to Operation Mode 9 (Cyclic Synchronous Velocity Mode) |
Step 6 | Step 7 |
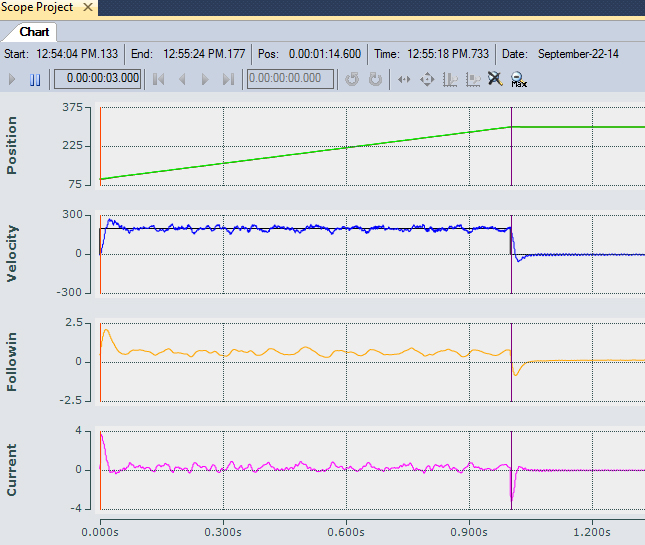
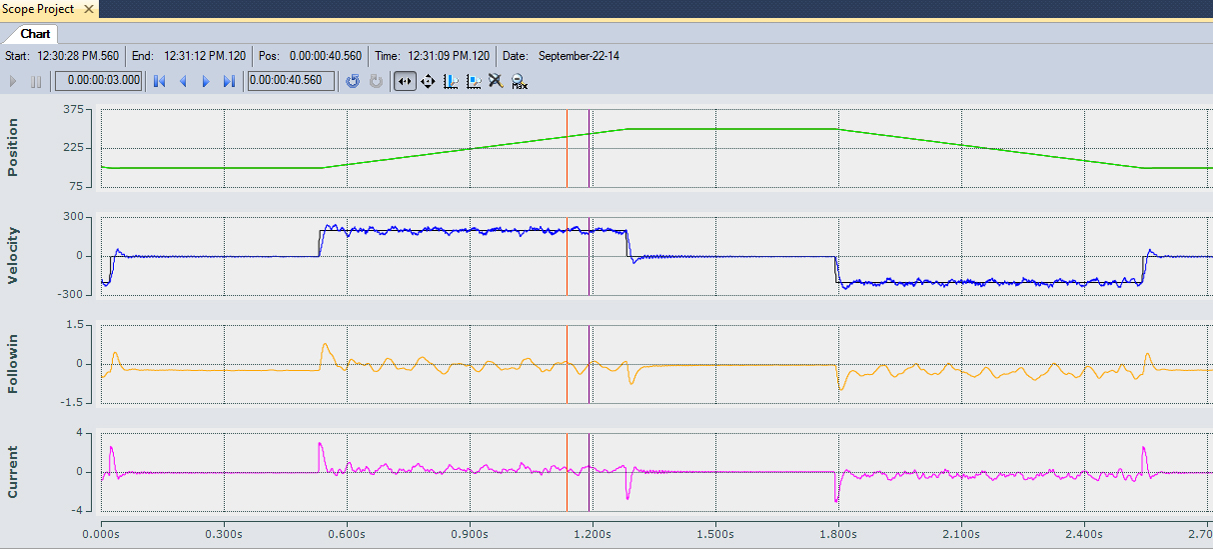
With the previous velocity step sequence command the axis will drive forward at 500mm/s for 0.5 seconds and then reverse at -500mm/s for 0.5 seconds. | With this configuration it is much easier to tune the Velocity control loop. Using standard motor control tuning practices the velocity should have an over shoot of approximately 10% without reaching current saturation. In the above example we see that the current is being saturated and a lower velocity command must be used. |
|
|
|
|
Step 8 | Step 9 |
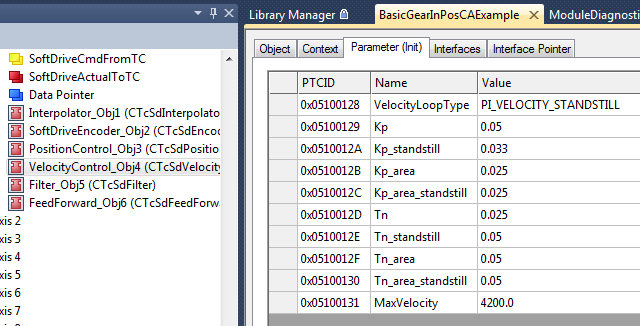
Adjusting the command to a command value of +/- 200mm/s gives a usable value with the below graph | The +/-200mm/s command reaches a peak current of less than 4A and the peak velocity is 257mm/s, 25%% overshoot. This can be minimized somewhat but the velocity ripple of an XTS system is generally quite large. The parameters to be adjusted are the Kp Parameters and the Tn Parameters. |
|
|