The Main Soft drive Object contains the following parameters
Parameter | Default value | Unit | Description |
|---|---|---|---|
ADS Port |
|
| This is the ADS Port number of the task that the Soft Drive is linked to; do not change this value by hand. |
Hardware Modulo | 3000 | Mm | The circumference of the track. (E.g. 1m Starter kit has 3000mm circumference. 1.5m starter kit is a 4000mm circumference. This value is automatically entered by the Configurator Tool. |
Operation Mode | 8 |
| Operation Mode corresponding to CanOpen object 0x6060 for normal operation this must be 8, to allow Velocity Step commands during tuning only this value must be 9. |
Max Current Output | 12.0 | A | Maximum current the mover can use. This value can be lowered but not increased above 12. 12 A corresponds to ~100 N. |
Emergency Ramp | 10000 | mm/s² | Default emergency ramp on fault. Can be changed but ensure it is feasible and will not generate a secondary fault. E.g. Decelerating all movers so fast that the DC bus causes an overvoltage error and all movers coast. |
Emergency Time Out | 0.5 | S | Time after an emergency ramp is engaged after which the soft drive will be disabled. Can be changed if necessary ensure feasibility. |
Stand Still Switch Time | 0.1 | s | Time after Set Velocity is zero before the mover is determined to be at standstill. (Control loops with Standstill parameters enabled will switch to standstill parameters after this time). |
Control Areas | 1 | Array | Determines the number of Control Areas available. A maximum of 4 control areas can be set. When a control area is enabled and a control loop uses area parameters, when the axis is in an area, the area parameter. |
[arrayindex] is Enabled | False | True/False | Enable use of Area Parameter Set. Set to True to enable Area Parameters (Control loops must also be enabled to used area parameters) |
[arrayindex] reserved | 0 |
| Reserved for future use, do not change |
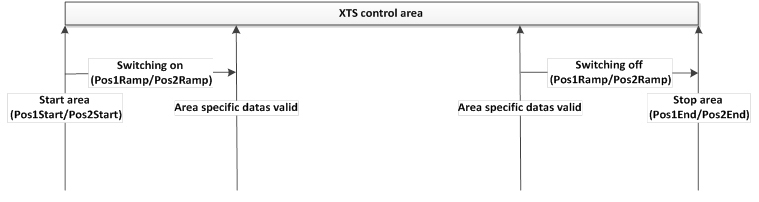
[arrayindex] StartPosition Valid values are from 0 to the Hardware Modulo. Negative numbers or values larger than the hardware modulo are ignored
| 0
| mm | Linear Location where the Area starts Note: The hardware positions are determined in accordance with the Soft Drive. Hardware Position. Reversing the counting direction of the mover does not reverse the hardware position |
[arrayindex] EndPosition Valid values are from 0 to the Hardware Modulo. Negative numbers or values larger than the hardware modulo are ignored | 0
| mm | Linear Location where the Area ends Again dependent upon Hardware position. |
[arrayindex] Transition Length Valid values are from 0 to half of the defined area. (StartPosition-EndPosition)/2 | 0
| mm | Ramp distance for linearly switching to/from area parameters. |
|