Characteristics of workspace/protection space monitoring
A workspace is defined as a zone that the TCP is not permitted to leave. A protection space must never be touched by the TCP. Workspaces and protection spaces can be nested inside one another to any extent required. When areas are nested, protection space monitoring takes precedence over workspace monitoring.
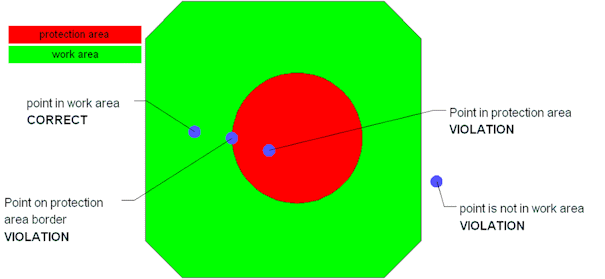 Fig.2: Definition of work/protection areas
Fig.2: Definition of work/protection areas3D bodies based on control areas
A workspace/protection space is defined by a three-dimensional body in space. Basically, two different geometries are available. Circles or polygons can be defined with a third, constant dimension.
Cylinders are defined by a full circle in the basic plane.
Polygons can be of any complexity in the basic plane. Only the convex form shape (self-contained chain without overlaps) is mandatory. The X/Y/Z coordinates of the control spaces are referred directly to the three main axes of the channel configuration.
Example of X/Y basic plane (G17):
- X -> first main axis
- Y -> second main axis
- Z -> third main axis (constant due to min/max values)
 Fig.3: Example of a wrong and correct polygon contour
Fig.3: Example of a wrong and correct polygon contour | Control spaces are always defined from the point of view of the channel configuration's three main axes (Cartesian). |
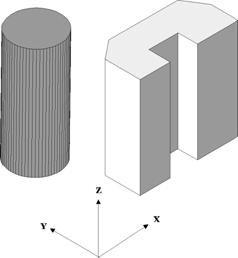 Fig.4: Definition of 3D control spaces
Fig.4: Definition of 3D control spaces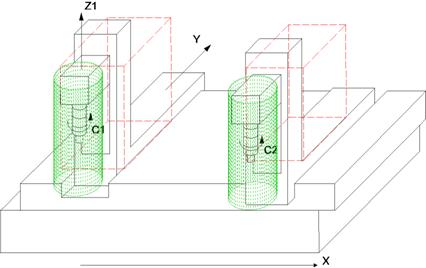 Fig.5: Example application
Fig.5: Example applicationPath check
In the case of workspace/protection space monitoring, the path between the starting and end point is checked for a violation. In the case of normal linear and circular motion blocks, intersecting points with the defined control spaces are sought via equations. When polynomial contouring is activated or in the case of helical motions, the path is first segmented and then the individual points are checked. This results in the need for considerably more computing.
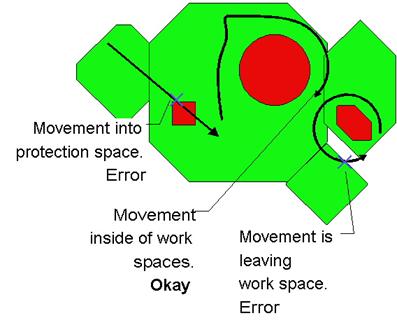 Fig.6: Path check during space monitoring
Fig.6: Path check during space monitoring