SetParameter()
A set of parameters specific to this homing procedure is set.
Syntax:
METHOD SetParameter : HRESULT
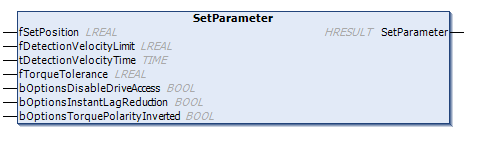
VAR_INPUT
fSetPosition : LREAL;
fDetectionVelocityLimit : LREAL;
tDetectionVelocityTime : TIME;
fTorqueTolerance : LREAL;
bOptionsDisableDriveAccess : BOOL;
bOptionsInstantLagReduction : BOOL;
bOptionsTorquePolarityInverted : BOOL;
END_VAR Return value
Return value
Name | Type | Description |
|---|---|---|
SetParameter | HRESULT | Return value with feedback on the success of the execution. |
 Inputs
Inputs
Name | Description |
|---|---|
fSetPosition | The position to be assigned to the homing event. |
fDetectionVelocityLimit | A velocity threshold for the detection of the homing event. For details see below. |
tDetectionVelocityTime | A filter time for the detection of the homing event. For details see below. |
fTorqueTolerance | A torque threshold for the detection of the homing event. For details see below. |
bOptionsDisableDriveAccess | A TRUE prevents the underlying motion technology from using ADS communication via the fieldbus to change parameters of the controlled device and return to normal operation. |
bOptionsInstantLagReduction | A TRUE causes the lag error to be cleared (set position := actual position) when the homing event is detected. |
bOptionsTorquePolarityInverted | A TRUE causes an inverted evaluation of the torque. |
 | The homing event A mechanical block as a homing event is detected if at the same time the torque is below the torque limit by less than |
Requirements
Development environment | Target platform | PLC libraries to include |
|---|---|---|
TwinCAT v3.1.4024.35 | PC or CX (x64, x86) | Tc3_PlasticFunctions v3.12.4.26 or higher |