FB_AxisBase - Virtual axes
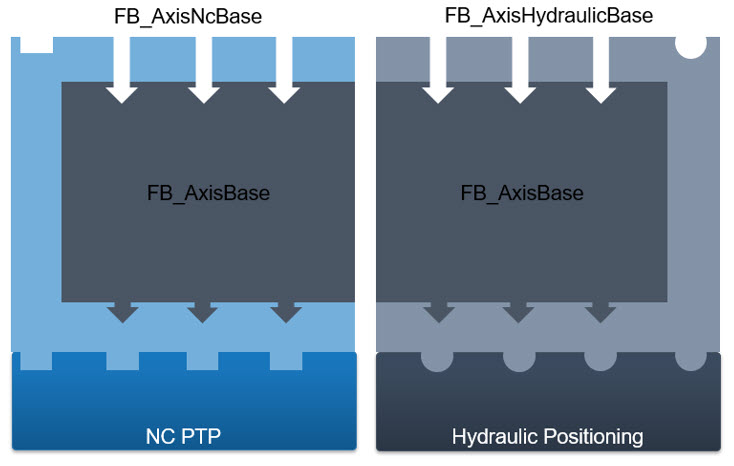
TwinCAT 3 Plastic Technology Functions defines FB_AxisBase as a virtual base axis. This provides the core functions required for both electric and hydraulic drives. The ABSTRACT definition means that FB_AxisBase cannot be instantiated. This is intentional, as the connection to specific Motion Control libraries is missing and some core functions are only instantiated in the specific versions.
For electric axes FB_AxisNcBase and for hydraulic axes FB_AxisHydraulicBase is derived from FB_AxisBase. On the one hand, the connection to the Motion Control libraries is established. On the other hand, special axis types add their own core functions for their mode of operation. The following figure shows how the axis classes (FBs) in TwinCAT 3 Plastic Technology Functions are to be understood structurally.
Further motion objects
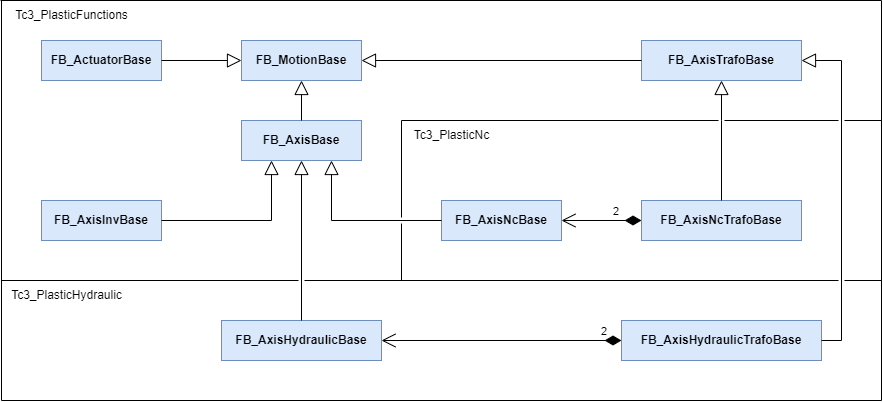
In addition to the basic concept of NC-based and hydraulic-based axes, the Plastic Technology Functions provide further axis and movement types. These include transformation and inverter axes as well as digital linear actuators. The following UML diagram shows the relationship between the individual types and their availability per library.