FB_BA_SunBldSwi
This function block can be used to control the blind FB_BA_SunBldActr or roller shutter FB_BA_RolBldActr in manual mode. The connection takes place via the positioning telegram ST_BA_Sunbld either directly or with an additional priority controller.
Structure of the blind positioning telegram ST_BA_Sunbld.
TYPE ST_BA_SunBld:
STRUCT
rPos : REAL;
rAngl : REAL;
bManUp : BOOL;
bManDwn : BOOL;
bManMod : BOOL;
bActv : BOOL;
END_STRUCT
END_TYPEOperation
In manual mode, the function block controls the blind function block FB_BA_SunBldActr or the roller shutter function block FB_BA_RolBldActr via the command inputs bUp and bDwn; bUp has priority. The commands are passed on to the respective commands bManUp and bManDwn of the positioning telegram. If a command input is activated that is longer than the entered time udiSwiOvrTi_ms [ms], then the corresponding control command latches. Activating a command input again releases this latch.
If the function block is activated by input bEn=TRUE, bit bActv is set immediately in the positioning telegram. The function block uses this to notify a priority switch (FB_BA_SunBldPrioSwi4 or FB_BA_SunBldPrioSwi8) of its priority over lower priorities. At the same time, the bit bManMod is set in the positioning telegram to notify the connected actuator function blocks that they should respond to manual commands.
If the function block is deactivated by bEn=FALSE, both bits, bActv and bManMod, are set to FALSE again.
Linking to the blind function block
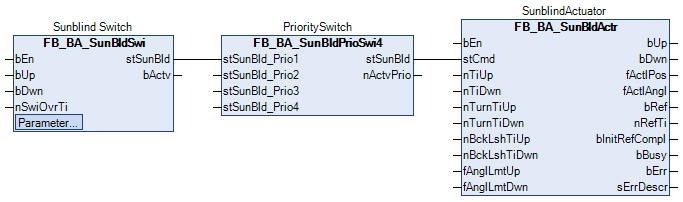
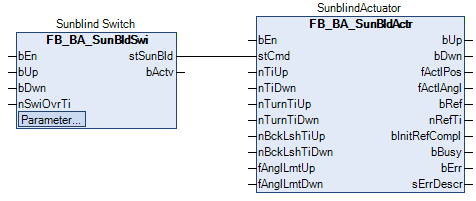
The manual mode function block can be connected either via an upstream priority control FB_BA_SunBldPrioSwi4 or FB_BA_SunBldPrioSwi8, or directly at the blind function block. The connection is established via the positioning telegram ST_BA_Sunbld.
Use of a priority controller:
Direct connection:
VAR_INPUT
bEn : BOOL;
bUp : BOOL;
bDwn : BOOL;
udiSwiOvrTi_ms : UDINT;bEn: The function block has no function if this input is FALSE. In the positioning telegram ST_BA_Sunbld, 0 is output for the position and the angle - bManMod and bActv are FALSE. For a connection with priority controller this means that another functionality takes over control of the blind. Conversely, a direct connection allows the blind to drive directly to the 0 position, i.e. fully up, since the actuator function block does not evaluate the bit bActv itself.
bUp: Command input for blind up.
bDwn: Command input for blind down.
udiSwiOvrTi_ms: Time [ms] until the corresponding manual command in the positioning telegram ST_BA_Sunbld switches to latching mode, if the command input is activated permanently. Internally limited to a minimum value of 0.
VAR_OUTPUT
stSunBld : ST_BA_SunBld;
bActv : BOOL;stSunBld: Positioning telegram, see ST_BA_SunBld.
bActv: Corresponds to the boolean value bActv in the blind telegram ST_BA_SunBld and is solely used to indicate whether the function block sends an active telegram.
Requirements
Development environment | Required PLC library |
|---|---|
TwinCAT from v3.1.4024.7 | Tc3_BA from v1.1.6.0 |