Collision avoidance between Planar movers and Planar tracks
Operation mode of the track and collision avoidance
As already described in the Planar track operation modes section, the behavior of Planar tracks in the Planar group depends on their operation mode. In the "Moving" operation mode, a Planar track blocks the entire area of all points that have a distance less than (or equal to) the maximum radius of the movers. The maximum radius of the mover results from the two parameters of the track "Maximum mover width/height". In all other operation modes, the track does not block its area.
Command modes of the mover and collision avoidance
Planar movers always block their geometry in the Planar group unless they are in OnTrack command mode and their track is in Moving operation mode. In this case, the responsibility for 2D collision avoidance is transferred from the mover to the track and the movers on the track keep their distance via the 1D collision avoidance on the track.
Collision possibilities
The first MoveOnTrack command of a Planar mover on a Planar track can be rejected due to a collision error. This happens, for example, if another Planar mover in FreeMovement operation mode has a distance between its geometry and the Planar track that is less than (or equal to) the maximum radius of the Planar track. Conversely, a MoveToPosition command of a Planar mover can be rejected with a collision error if the resulting collision geometry has a distance to the Planar track that is less than (or equal to) the maximum radius of the Planar track.
Example
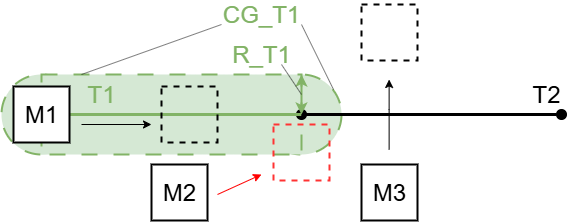
| M1, M2, M3 | Mover 1, Mover 2, Mover 3 |
| R_T1 | max. radius |
| CG_T1 | Collision geometry |
| T1, T2 | Track 1, Track 2 |
In this example, Planar mover 1 (M1) moves on Planar track 1 (T1). As a result, Planar track 1 is in Moving operation mode and blocks its collision geometry (in green). This results from all points that have a distance to the Planar track 1 that is less than (or equal to) the maximum radius (R_T1). The MoveToPosition command of Planar mover 2 (M2) is therefore rejected, as its target position collides with the collision geometry of Planar track 1. The MoveToPosition command of Planar mover 3 (M3) is not rejected because its target position and movement do not collide with the collision geometry of Planar track 1 and Planar track 2 does not block its collision geometry in the Standing operation mode. During the movement of the Planar mover 3, no mover can now perform a movement on the Planar track 2. This would be rejected with a collision with Planar mover 3.