Parts and coordinate systems
The surface that the XPlanar movers move on is made up of stators. These are, for example, squares with a side length of 240 mm or rectangles/squares with a side length of 160 or 320 mm. The entire base area is divided into one or more parts consisting of one or more stators. A stator can only belong to one part, i.e. the parts do not overlap. The total number of stators of a part must be assembled in a contiguous surface.
This geometric configuration of the XPlanar system is usually static; it does not change during system runtime. To create a dynamic configuration, the user must move or relocate individual parts by assigning them more than one position and activating them at runtime.
In general, an issue arises: the positions are no longer unique or there is no absolute coordinate system. The user can define several (2D) coordinate systems and place his parts in these.
 | A 2D position (e.g. of a mover or track) is now incomplete without an indication of which coordinate system it is located in. |
Example
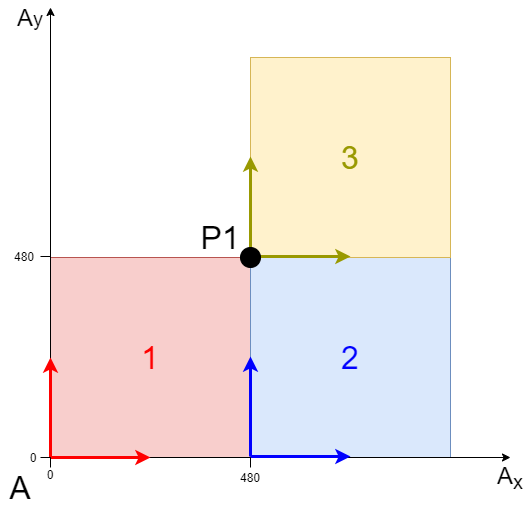
There are four parts, 1-4, and two coordinate systems, A and B. Part 3 is either in coordinate system A or B. The other parts are permanently assigned to a coordinate system. The position P1 is located in the coordinate system A at the position X=480 and y=480 (P1=(480,480,A) for short).
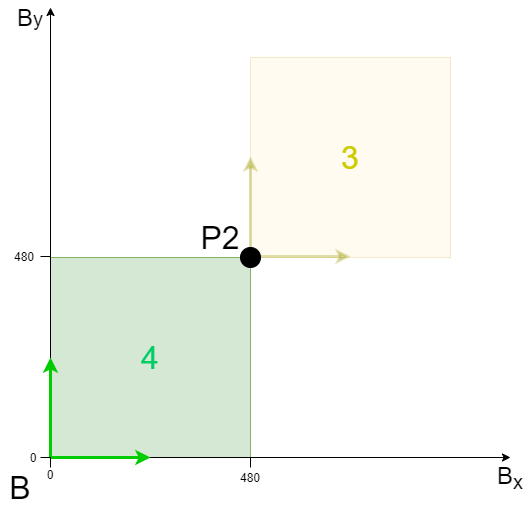
The position P2 is located in the coordinate system B at the position X=480 and y=480 (P2=(480,480,B) for short).
Without specifying the coordinate system A, the position P1 would not be distinguishable from the position P2 in coordinate system B (480,480,B). However, both positions are different and are not even in the same coordinate system, i.e. there is no geometric connection between them (e.g. a mover cannot travel from P1 to P2).
In addition to the coordinate systems A and B, there are also local part coordinate systems for each of the parts 1-4. These coordinate systems each have their origin in the lower left corner of their part. This means that P1 = (0,0,3) = (0,480,2) = (480,480,1) in the part coordinate systems of parts 1-3.
This is only true for part 3 as long as it lies in coordinate system A. The transparent representation of part 3 in coordinate system B shows that part 3 can change its position from coordinate system A to coordinate system B. The position of a part is identical to the origin of its coordinate system. Part 3 would therefore be moved from position P1 (in coordinate system A) to position P2, and now P1 can no longer be specified in the coordinate system of part 3.
Instead, the position P2 = (0,0,3) = (480,480,4) can be specified in the coordinate system of part 3 (and 4). Overall, it becomes clear that positions in part coordinate systems are not static if the part is moved with its coordinate system.