Background Information
Coordinate systems – relationships
- WCS
World Coordinate System. - MCS
Machine Coordinate System. - UCS
User Coordinate System. - PCS
Programmed Coordinate System. Workpiece.
Pick-and-Place: From warehouse to carrier
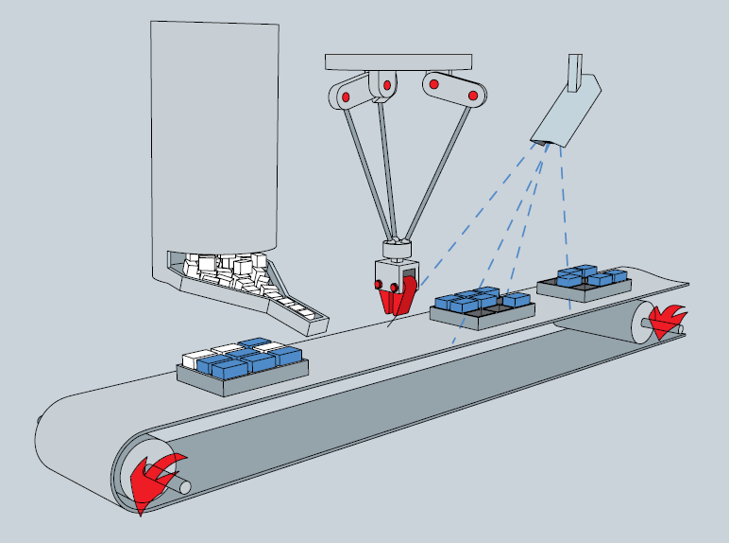
The workpieces must be taken from the warehouse and placed in the free carrier positions running on the conveyor belt.
Thereby,
- the storage place is defined within the
WCS, - the robot is located somewhere within the
WCS, - the robot can be controlled within its
MCS, - the conveyor belt is located somewhere in the
WCS, - on the conveyor belt a carrier can be located within the
UCS, - a workpiece can be located within its carrier within the
PCS.
Pick-and-Place: From conveyor belt towards conveyor belt
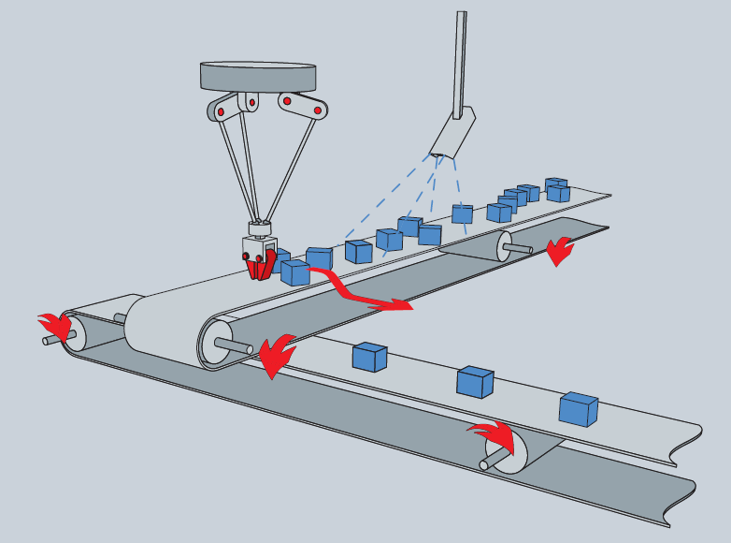
The workpieces have to be taken from the upper conveyor belt and placed on the lower conveyor belt.
Thereby,
- the robot is located somewhere within the
WCS, - the robot can be controlled within its
MCS, - each conveyor belt is located somewhere in the
WCS, - workpieces on the conveyor belt can be located within a
UCS.