Description
Real-time loops allow you to influence the number of loop passes in the NC program during machining.
A real-time signal can be used to determine whether to remain in a loop or to exit it at the end of a loop pass.
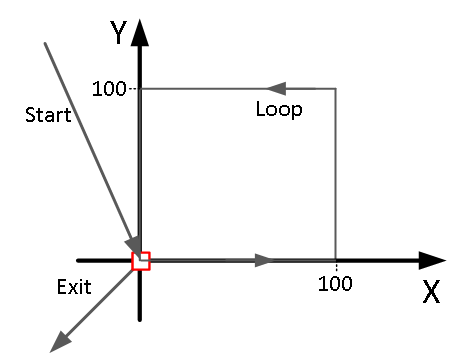
%RtLoop N010 X0 Y0 Z0 ;-loop : as long as ; V.RTG.LOOP.ENABLED = TRUE N020 #RT WHILE N040 X100 N050 Y100 N060 X0 N070 Y0 N090 #RT ENDWHILE ;------------ N100 X-20 Y-20 Z30 N110 M30 |
|
 | If the real-time variable is not set, the loop is skipped. |
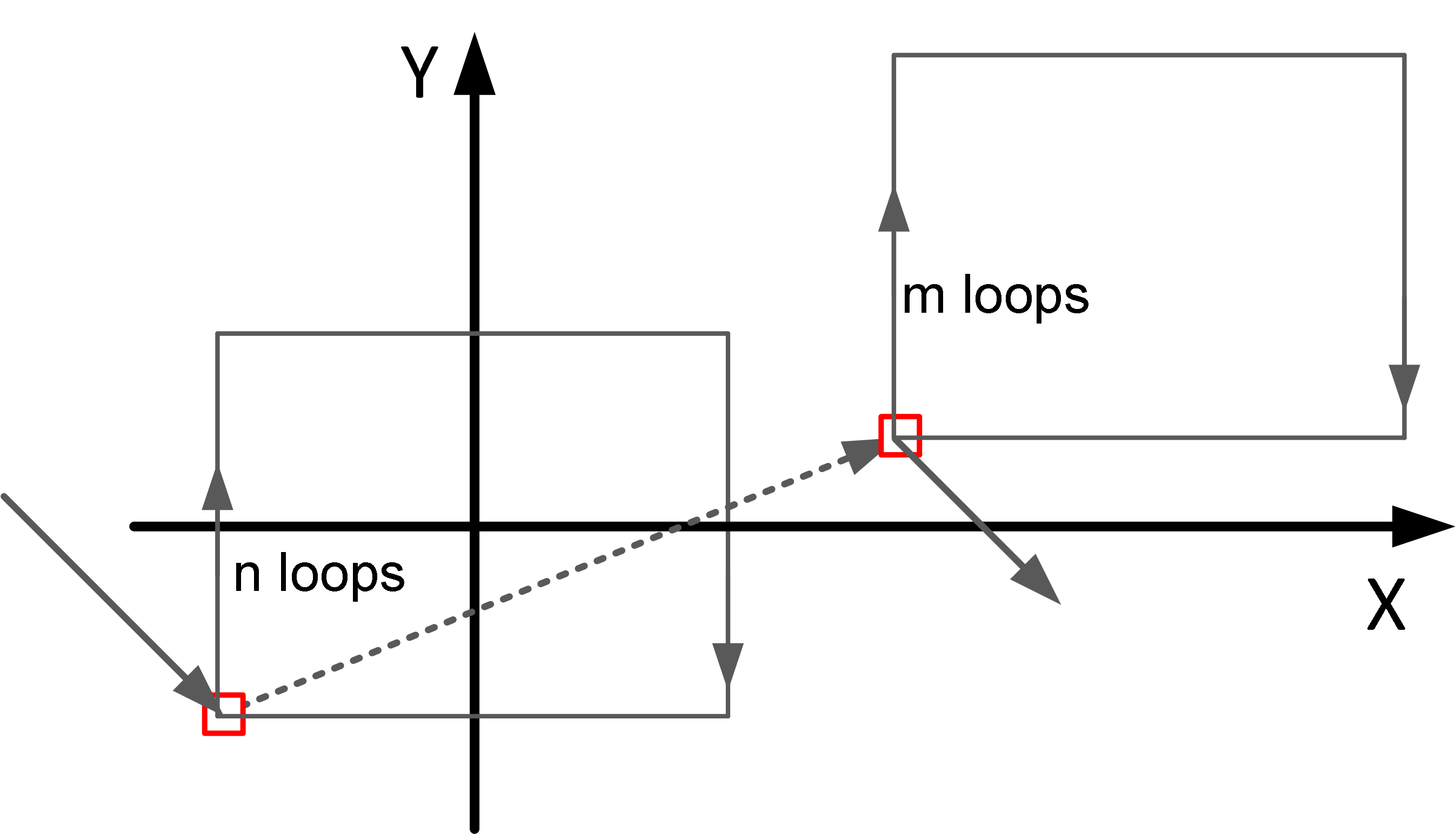
It is also possible to program several real-time loops in succession.
Definition and behaviour of real-time loops
When programming a real-time loop in the NC program, make absolutely sure that the position in the plane when entering the loop is identical to the position at the end of the loop.
| The start point and end point of the contour within a real-time loop must be identical. In case of deviations, error ID 50991 is output. |
Within the loop you can use the "Backward motion on the path" or "Delete distance to go” functions.
| Real-time loops are not permitted with tool radius compensation is active. Error ID 22158 is output. |
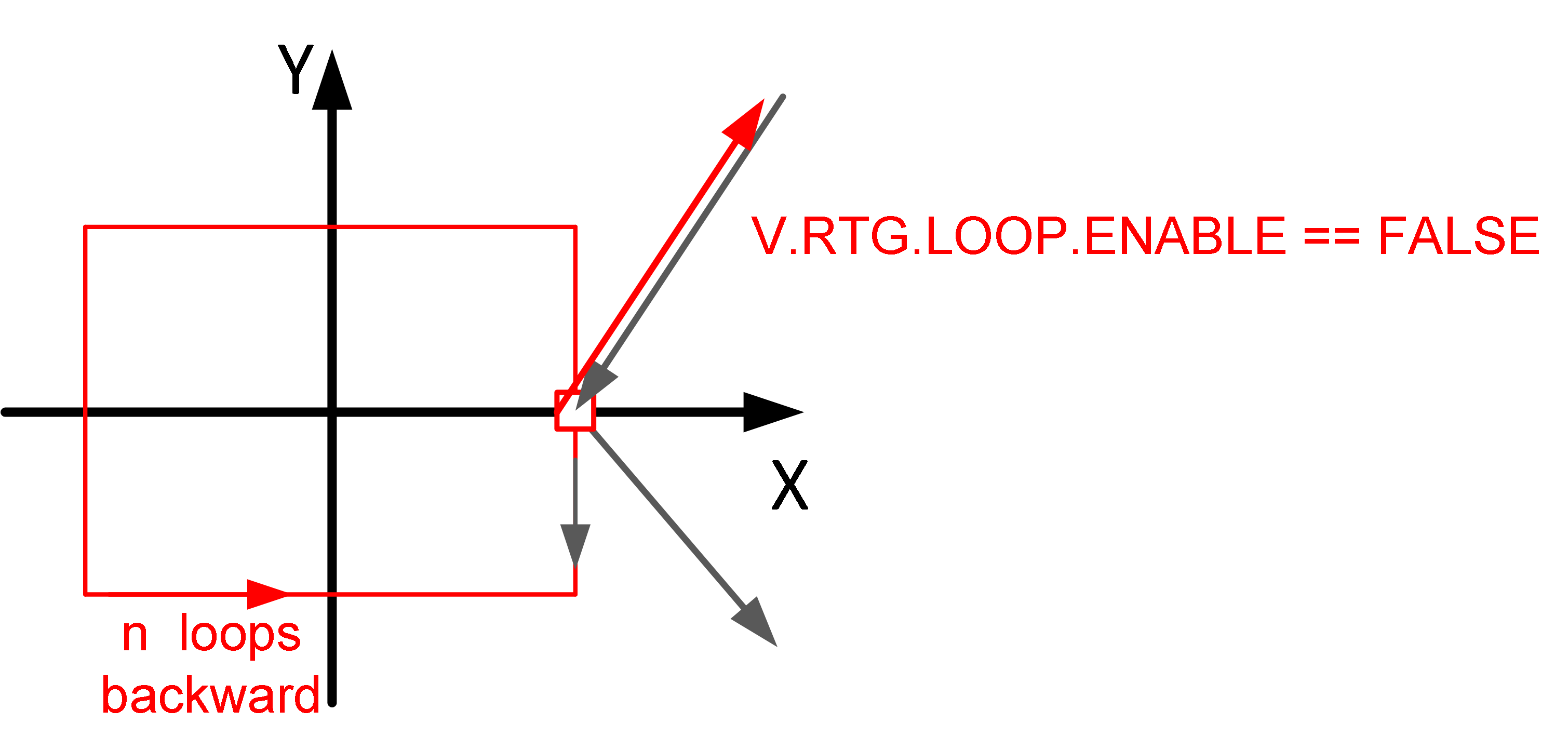
Behaviours with backward motion on the path
With motion backward on the path combined with real-time loops, it is possible to move backward immediately after entering the loop.
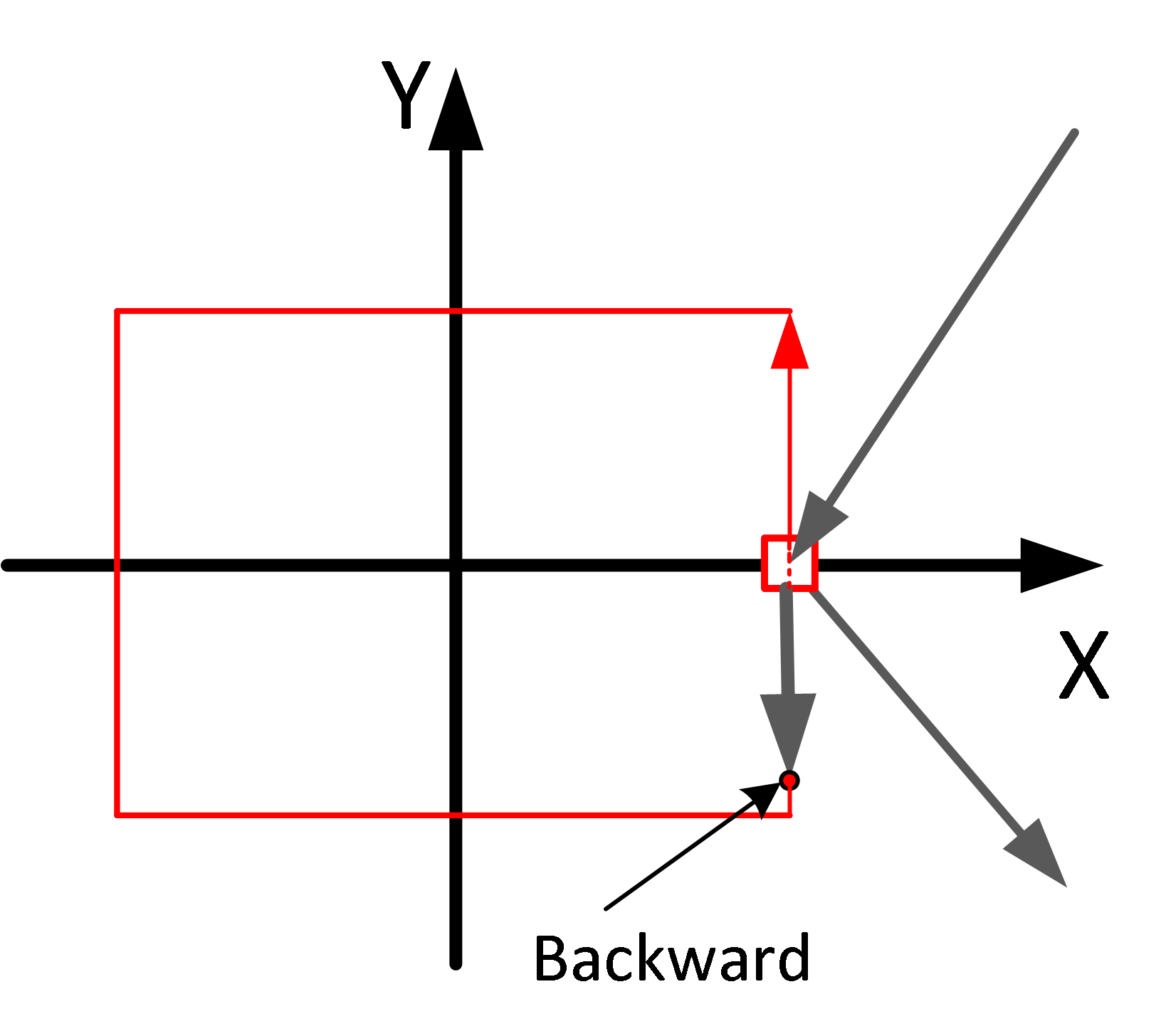
It is also possible to enter a loop backwards in an NC program and to complete the loop in the backward direction. The loop can also be exited backwards by setting the real-time variable.
Behaviour for deleting distance to go
The “Delete distance to go” control unit can delete the distance to go for a single block in the real-time loop-.
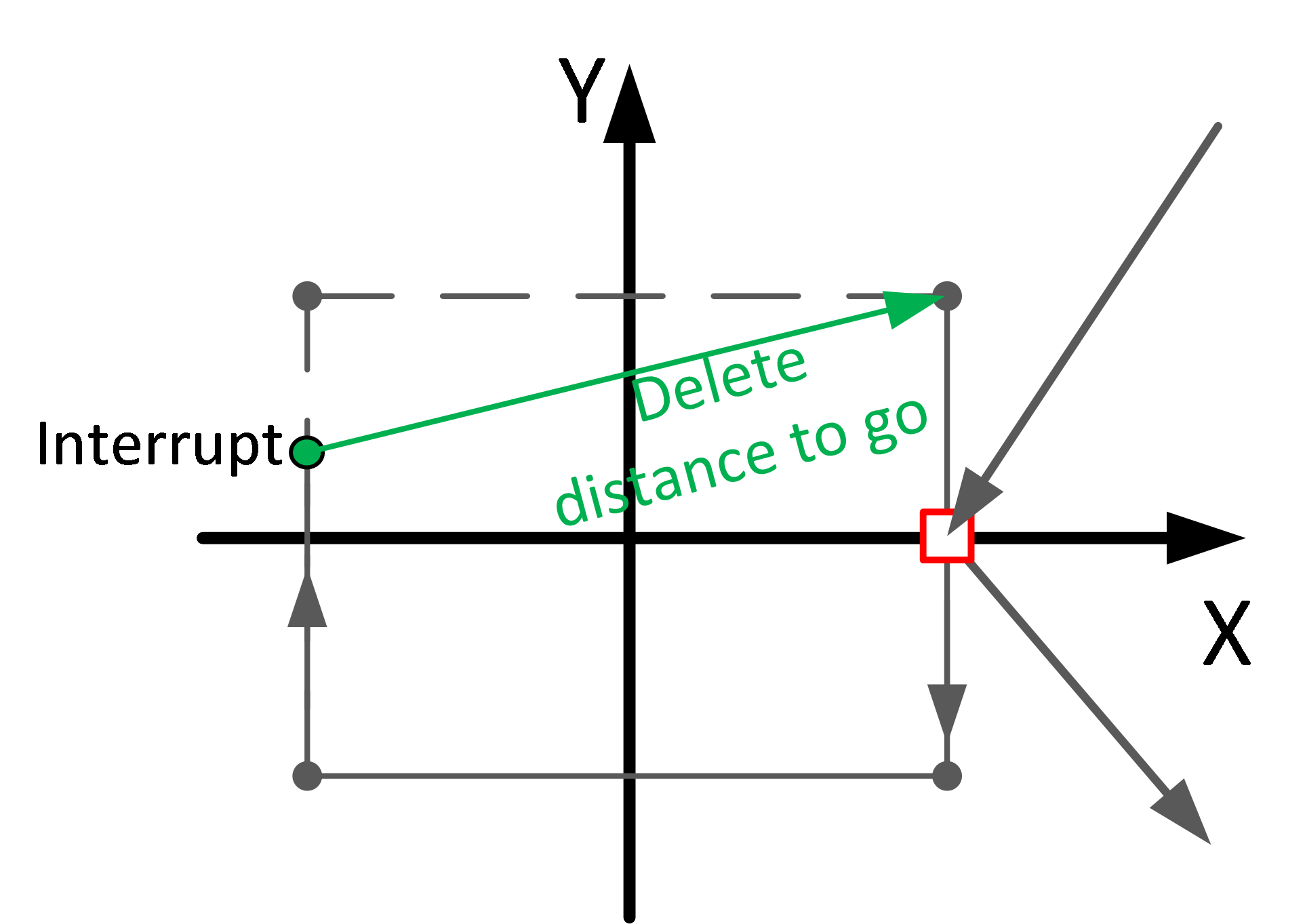
The function can also be used in the backward direction. The restrictions regarding backward motion in combination with delete distance to go apply.
[FCT-C28// Combination with backward motion]