Method 1: Characteristic curve a(n) in polynomial- or hyperbola form
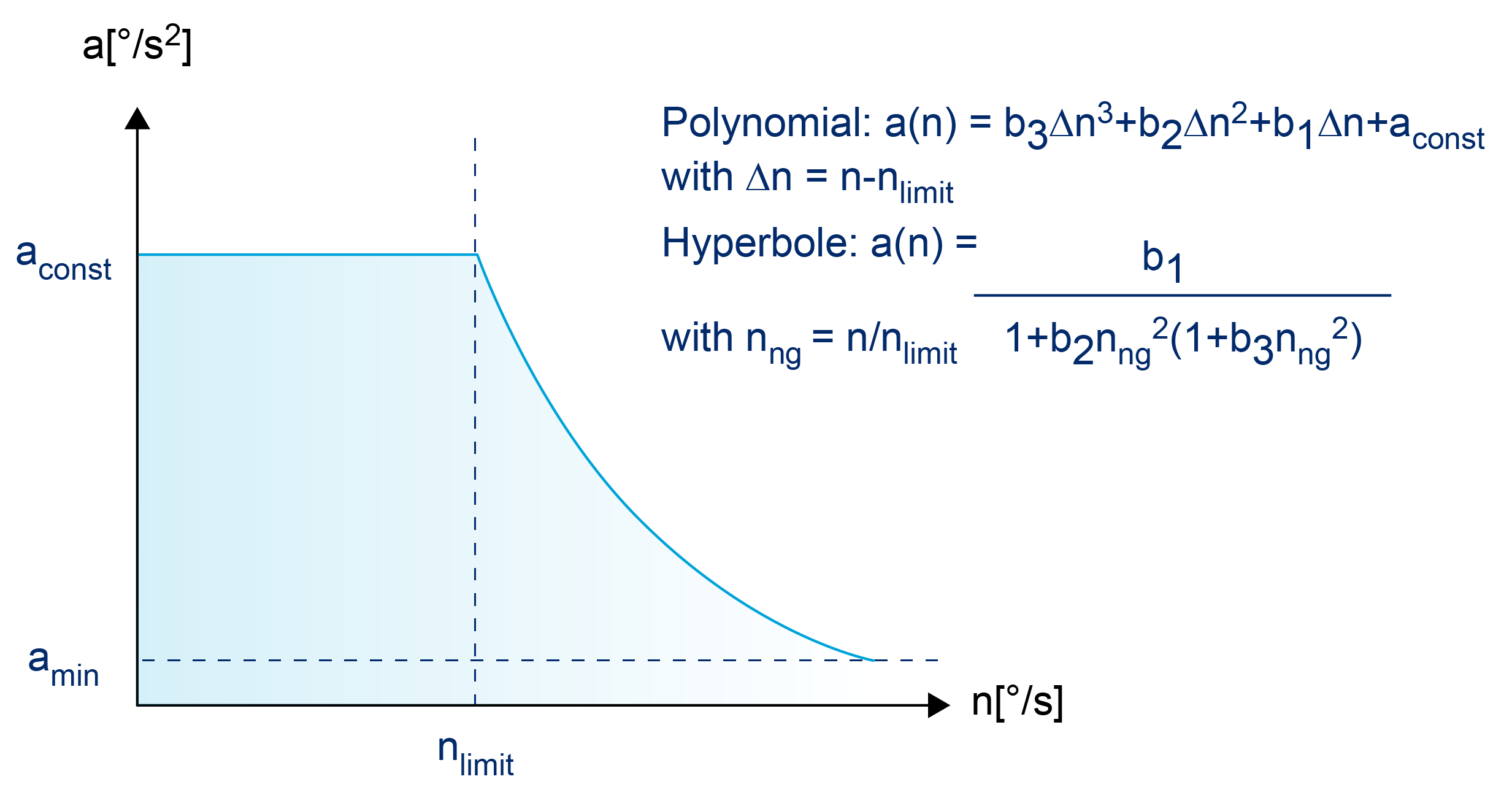
In the range above the limit speed, the current acceleration is optionally specified by a third-order polynomial or by a hyperbola function. In the case of both characteristics, a constant acceleration akonst is used in the range below ngrenz. This corresponds to acceleration at nominal speed. The curves apply to both the speed build-up and slow-down phases.
Interpolation points on the drive curve a(n) are used to determine the coefficients of the curves. 4 or 3 interpolation points are required to determine them.
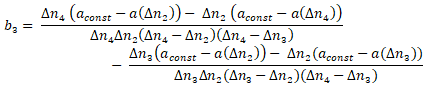
One interpolation point P1=(n1, (a(n1)) is already defined by the parameter for constant acceleration akonst and the limit speed ngrenz and the user can define the remaining 3 or 2 on the drive characteristic a(n). It is best for the abscissa values to be at a constant distance. The equations to determine the coefficients are listed below.

Polynomial


, relative speed



Example of curve determination
Interpolation point | Acceleration a [°/s2] | Speed n [°/s] |
1 | 16000 | 12000 |
2 | 8000 | 24000 |
3 | 4000 | 36000 |
4 | 2000 | 48000 |
aconst = 16000 [°/s2] to nlimit = 12000 [°/s]
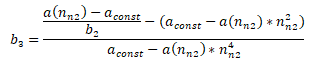
The following is obtained for the coefficients:
As from nominal speed (nlimit) the characteristic profile is as follows::

Hyperbola

 , normalised speed,
, normalised speed, 






Example of curve determination
Interpolation point | Acceleration a [°/s2] | Speed n [°/s] |
1 | 16000 | 12000 |
2 | 8000 | 24000 |
3 | 4000 | 36000 |
4 | 2000 | 48000 |
A_konstkonst = 16000[degrees/s2] to nlimit = 12000 [degrees/s]
The following is obtained for the coefficients:
As from nominal speed (nlimit) the characteristic profile is as follows::

Parameter
P-AXIS-00202 | Type: 1 (hyperbola) or 2 (polynomial) |
P-AXIS-00130 | Limit speed nlimit |
P-AXIS-00007 | Constant acceleration aconst for n<nlimit |
P-AXIS-00010 | Minimum acceleration amin |
P-AXIS-00026 | Coefficient b1 |
Coefficient b2 | |
Coefficient b3 |