Example
The “speed limit detect” status signal is generated depending on the set parameters if the programmed paths cause deceleration along the path and the speed drops below the speed limit, e.g. due to a corner.
Parameter
Excerpt from the channel parameter list [CHAN]:
 | Parameters can also be changed in the NC program by appropriate variables (V.G.SPEED_LIMIT.*) [PROG]. |
Programming Example
"Speed limit detect” status signal
M30The parameters listed above and the F word in the NC program result in:
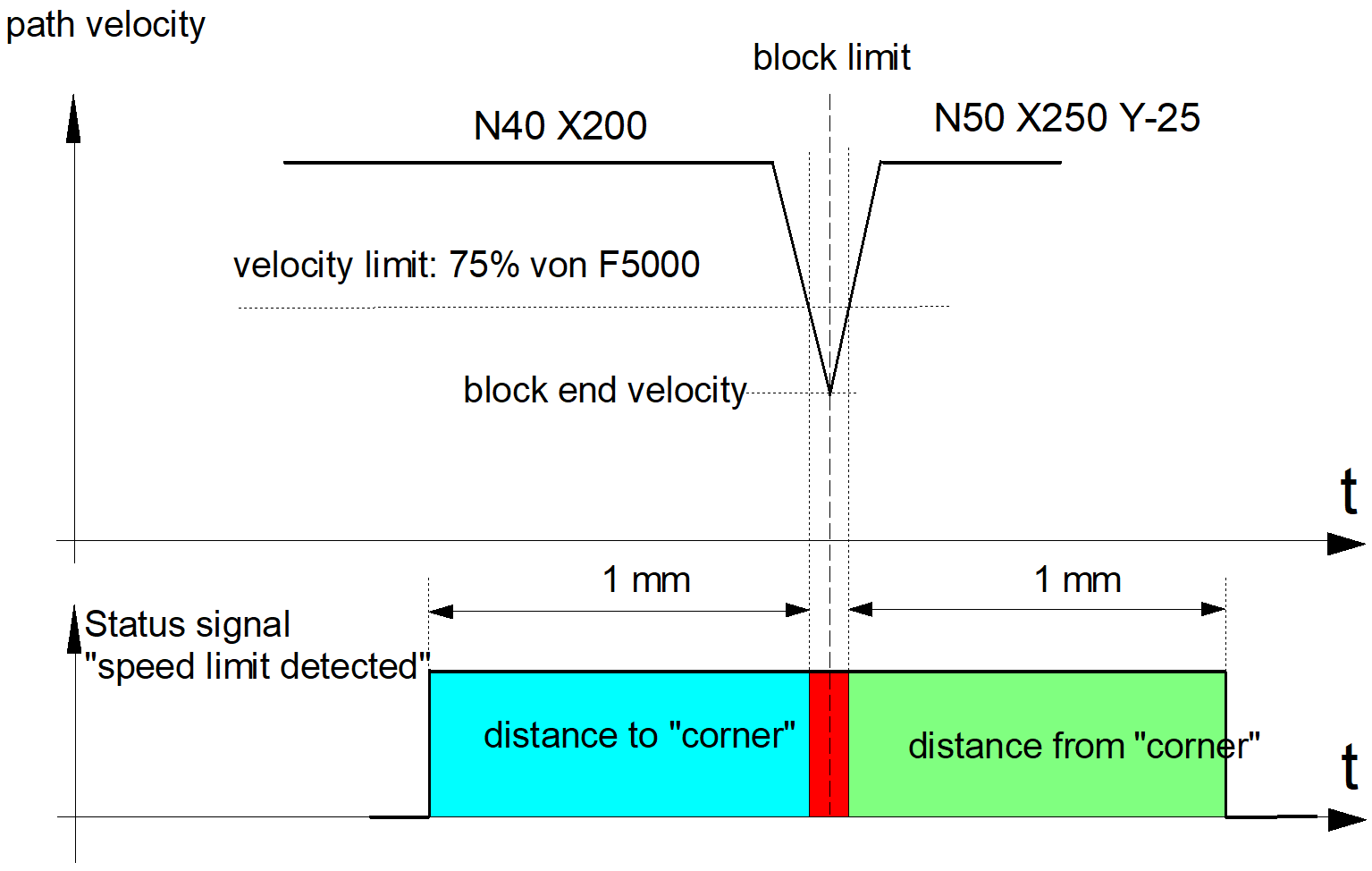
Speed limit = 75% of the programmed velocity
→ v_limit = 3750 mm/min (62500 um/s)
In the NC program example the path velocity drops to 8.562 um/s at block transition N40 -> N50 due to a path kink angle of 30 degrees. This means that the “speed limit detect” status signal is set 1 mm before limit speed undershoot at the block end of N40 and reset 1 mm after limit speed overshoot at the block start of N50.