SERCOS
Drive parameters
The following parameters must be set in the drive in order to use the measurement function:
- Real-time control and status bits used
- Measuring probe to be used
- Measuring probe control parameters
- Measured value in the cyclic telegram
Refer to the drive documentation for details of the parameters supported by the relevant drive.
In addition, a digital input of the drive amplifier may have to be parameterised as a measurement input. For details, refer to the drive amplifier documentation.
Real-time bits
The two real-time status bits and one real-time control bit are required for the measurement. The real-time status bits transfer the following information from the drive to the NC kernel:
- Edge occurred at measurement input (measurement completed)
- Measuring probe operated
In addition, a real-time control bit is required to activate the edge evaluation of the measurement input in the drive (enable measurement).
Assignment of the control and status bits used by the NC kernel is set in the NC kernel by the parameter P-AXIS-00060. In addition, parameters must be set accordingly in the drive amplifier.
The table below shows the assignment of P-AXIS-00060 in the NC kernel to the status and control bits used.
P-AXIS-00060 | Control bits | Status bits | |
| Measurement | measurement | Measuring probe |
0, no entry | Real-time control bit | P-AXIS-00106 | Real-time status bit |
1 | Real-time control bit | Real-time status bit | Real-time status bit |
2 | Real-time control bit | Real-time status bit | Real-time status bit |
 | We recommend setting P-AXIS-00060 either to value 1 or 2. Value 0 is only present for reasons of backwards compatibility and requires additional settings in P-AXIS-00106. |
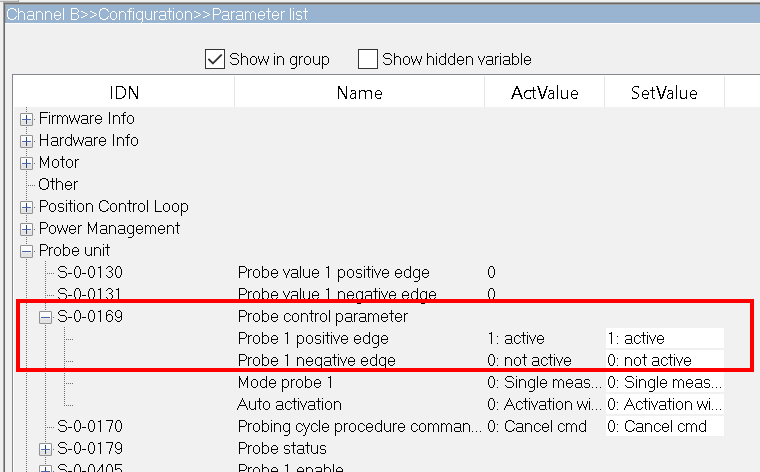
Measuring probe control parameters
The measuring probe control parameter (S-0-0169) is used to configure which measuring probe and which edge of the probing signal is to be used in the drive. This parameter determines where the positions detected are stored in the various SEROS IDs. The SERCOS IDs must then be transferred in the cyclic actual value telegram of the drive.
Measuring probe/edge | Measuring probe control parameters | Measured value identification |
Measuring probe 1, positive edge | S-0-0169 = 1 | S-0-0130 |
Measuring probe 1, negative edge | S-0-0169 = 2 | S-0-0131 |
Measuring probe 2, positive edge | S-0-0169 = 4 | S-0-0132 |
Measuring probe 2, negative edge | S-0-0169 = 8 | S-0-0133 |
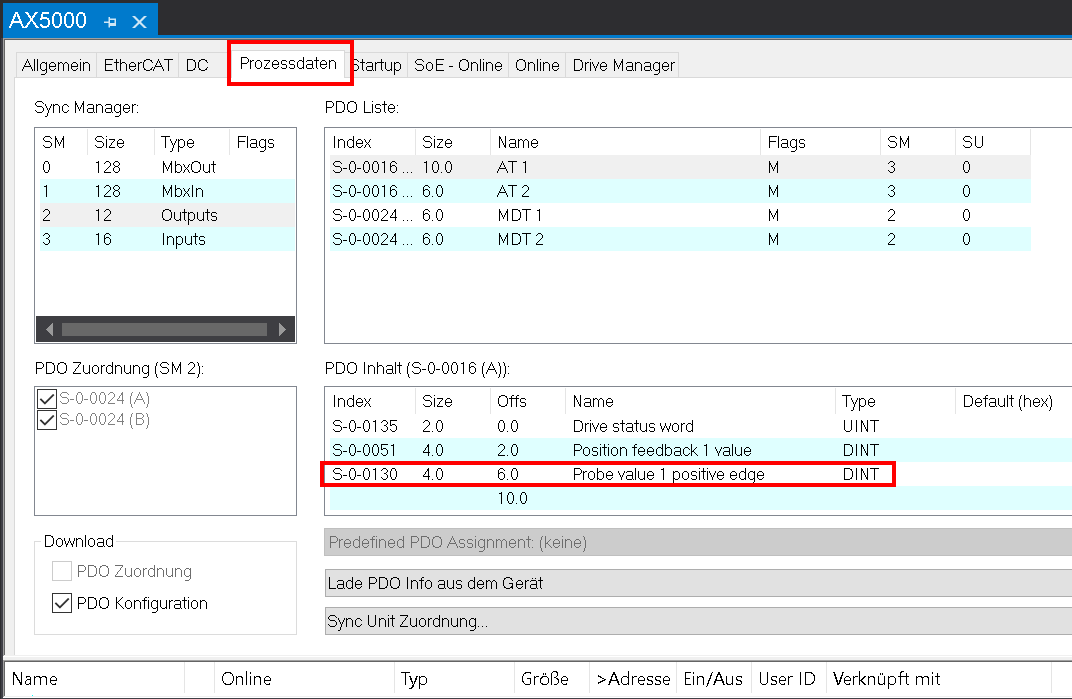
Parameterisation of the cyclic telegram
The measured value ID specified in the table above must be configured in the cyclic actual value telegram depending on the value of the measuring probe control parameter.
Axis parameter
For SERCOS drives, the following entries must be assigned in the axis parameter lists:
P-AXIS-00516 (old:P-AXIS-00116) | Measuring by drive: kenngr.measure.signal DRIVE |
P-AXIS-00518 (old: P-AXIS-00113) | Latch at positive or negative probing signal edge: kenngr.measure.edge POS / NEG |
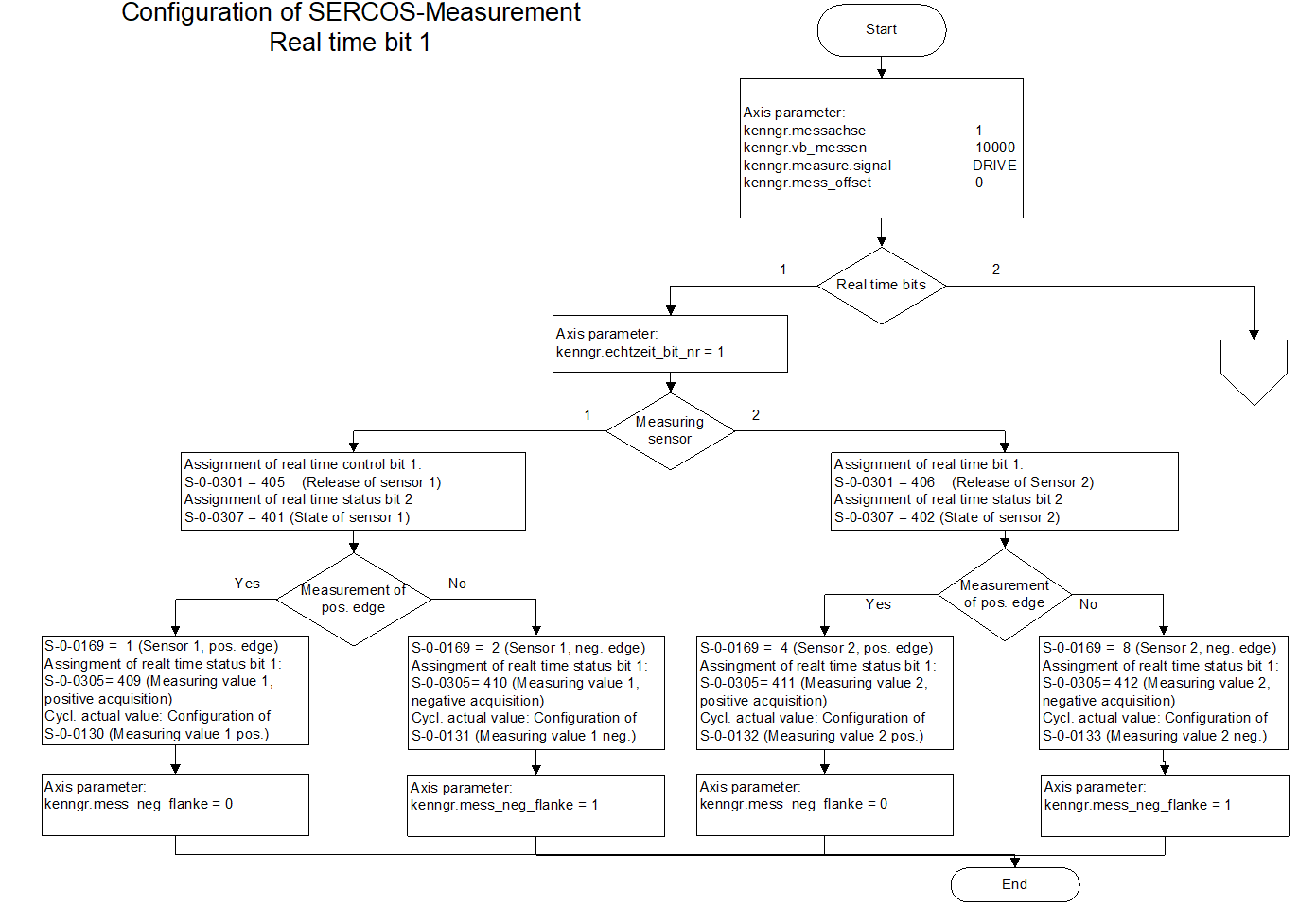
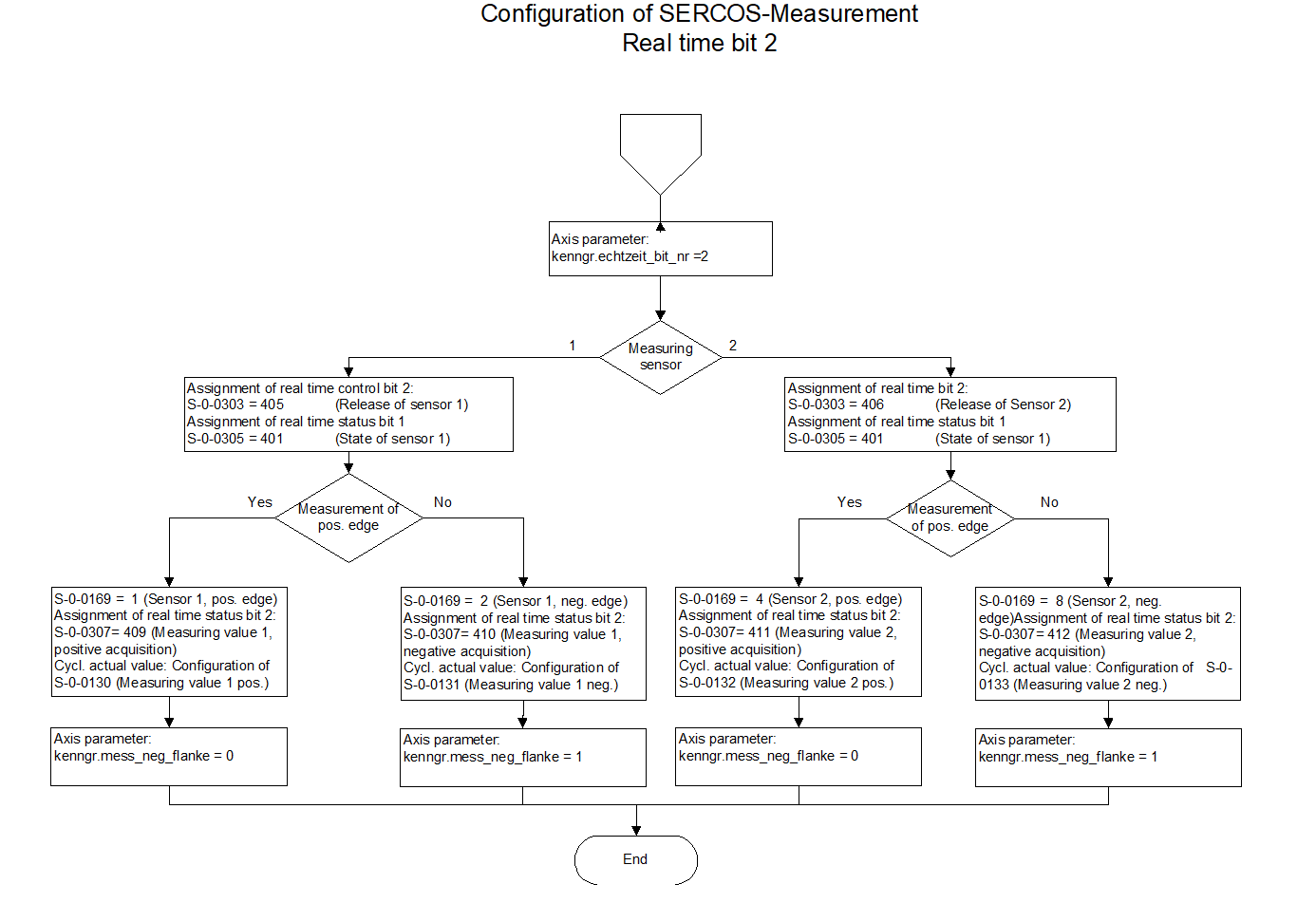
Parameterise a SERCOS drive
The steps required to parameterise a SERCOS drive are presented in a flowchart on the following pages.
Example
Axis parameter
The following parameters are necessary in the drive and in the NC kernel to configure the measurement function of a SERCOS drive on the rising edge of measuring probe 1 using the real time and status bits 1.
Cyclic telegram
Identification S-0-0130 must also be configured when a cyclic telegram is configured:
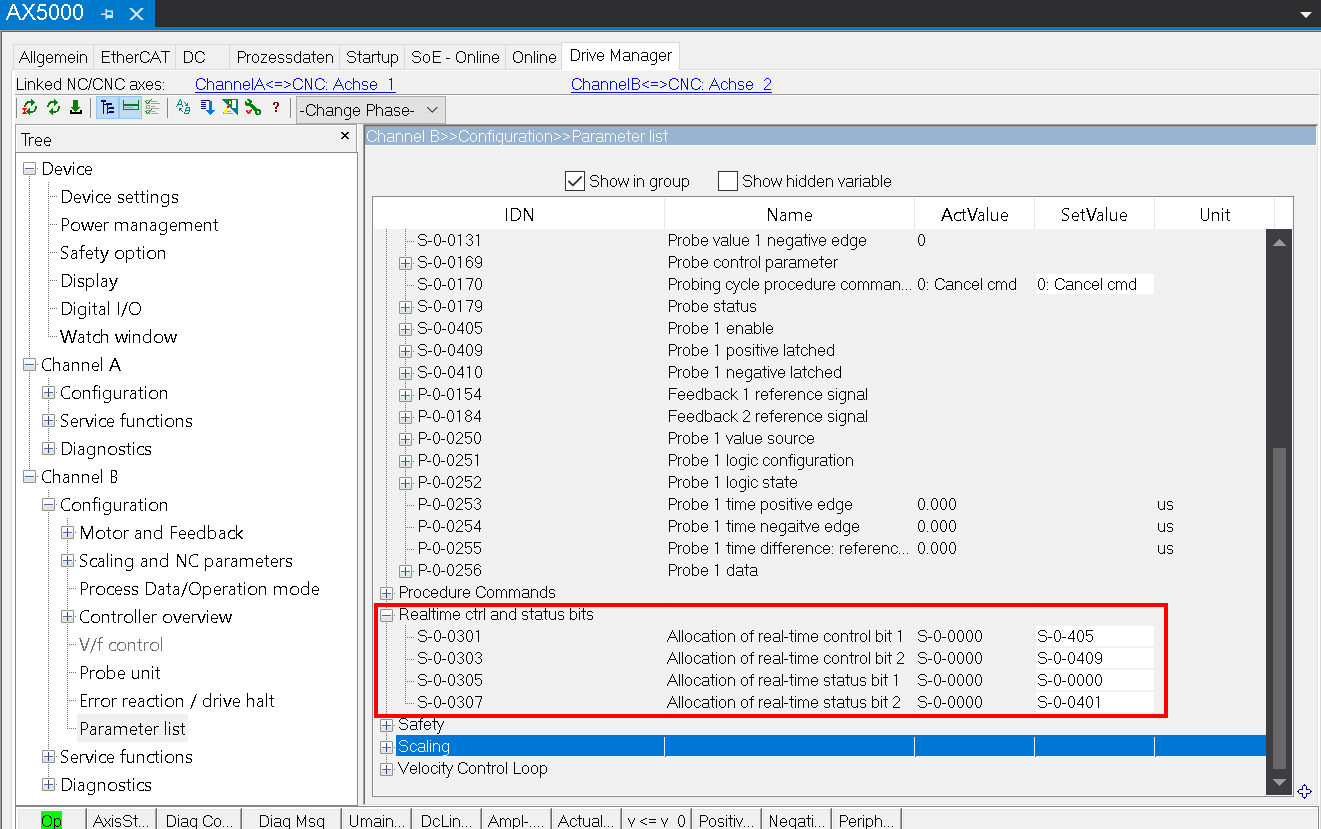
Drive
The real time bits 1 and measuring probe 1 are used:
- S-0-0301= 405 (real-time control bit 1 = measuring probe 1 enabled)
- S-0-0305 = 409 (real-time status bit 1 = measuring probe 1, positive detected)
- S-0-0307 = 401 (real-time status bit 2 = measuring probe 1)
Measuring probe control word
The value 1 must be entered in the measuring probe control word:
S-0-0169 = 1 (measuring probe 1 positive edge)