Determine parameters manually
Manual determination
Each of the compensation value list parameters can be determined “manually”.
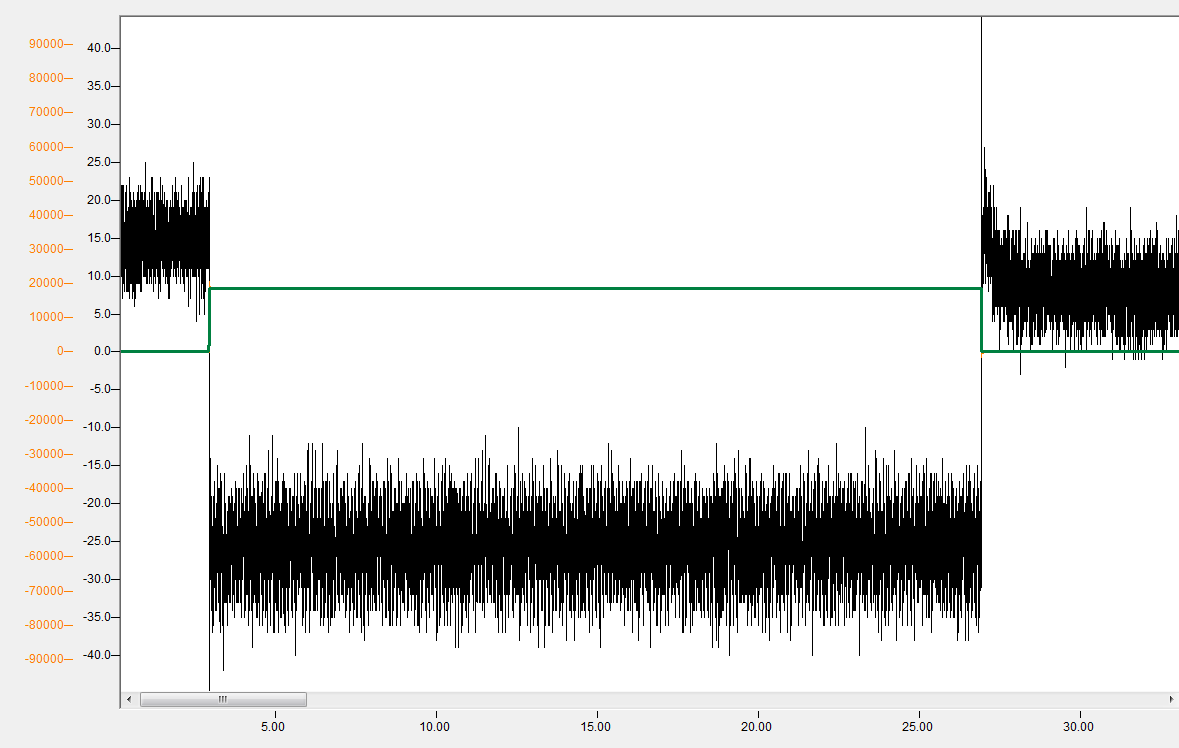
To this end, the associated current (dig_drv.act_torque), e.g. in the scope, must be read off during a motion at constant speed. The motor current during a motion at constant speed is mapped in the figure below. It can be seen that the current is in the opposite direction to the speed.