Path profile with non-tangential continuous block limits
Description
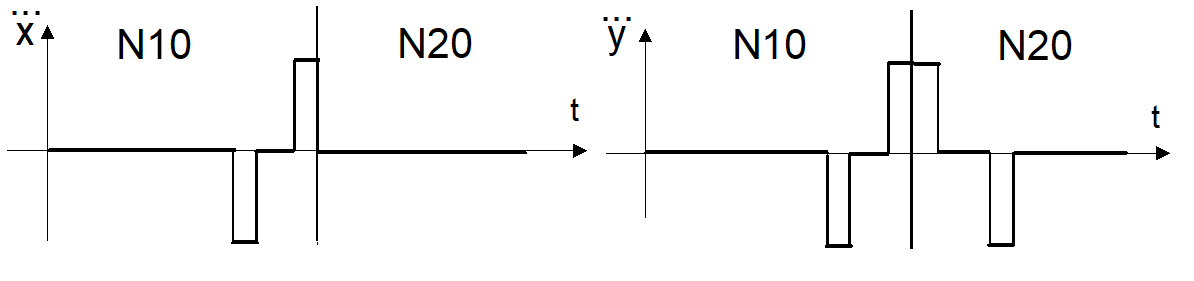
Axis acceleration jerks occur at non-tangential continuous block transitions of paths, e.g. linear blocks with a prismatic workpiece. This results in very pronounced axis jerks if the path velocity is not reduced to 0 at the block transition.
Nevertheless, the controller ensures that acceleration jerks remain below the maximum acceleration of the affected axes.
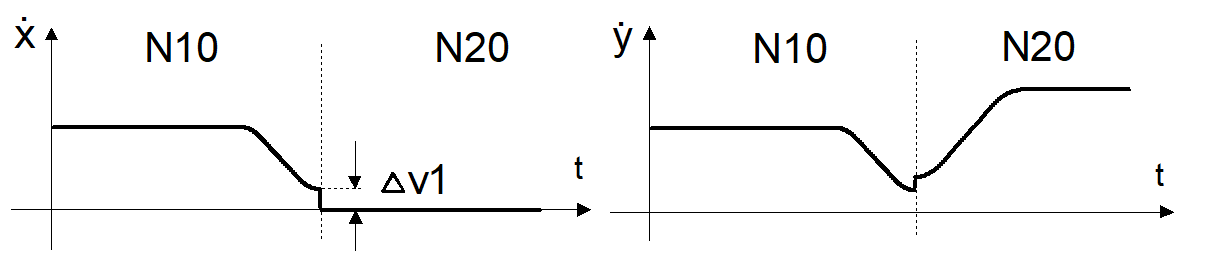
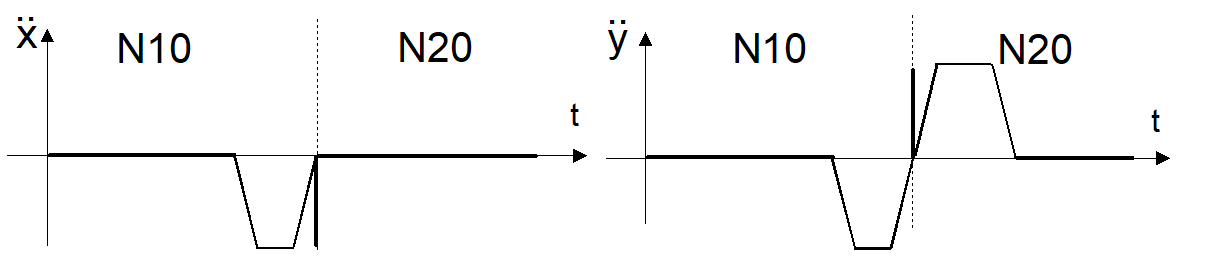
This response is shown below by the example of a 45° knee angle in the velocity, acceleration and jerk profiles between two linear axes.
Parameterisation
Parameter P-AXIS-00013 weights the permissible acceleration at the block transition.
The jerk limit is activated by the value 0. The weighting of the permissible acceleration is applied with a factor of cycle/ramp time. This maintains values within the permissible axis jerk. Result is a very low speed at the motion block transition.
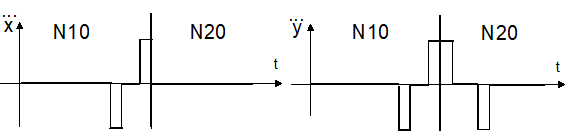
Set this parameter high if higher velocities are required for motions with higher axis jerk at block transitions. At a value of 1000 (upper limit), maximum acceleration is maintained at the block transition and the jerk exceeds the set limits.
| atrans = a * (P-AXIS-00013) / 1000. |
| jtrans = atrans /tzykl. |
A value > 0 may be practical if, for technological reasons, a drop in path velocity is not desirable at slightly discontinuous block transitions depending on the set acceleration.
A value < 1000 may be practical when the machine is highly prone to critical vibrations.
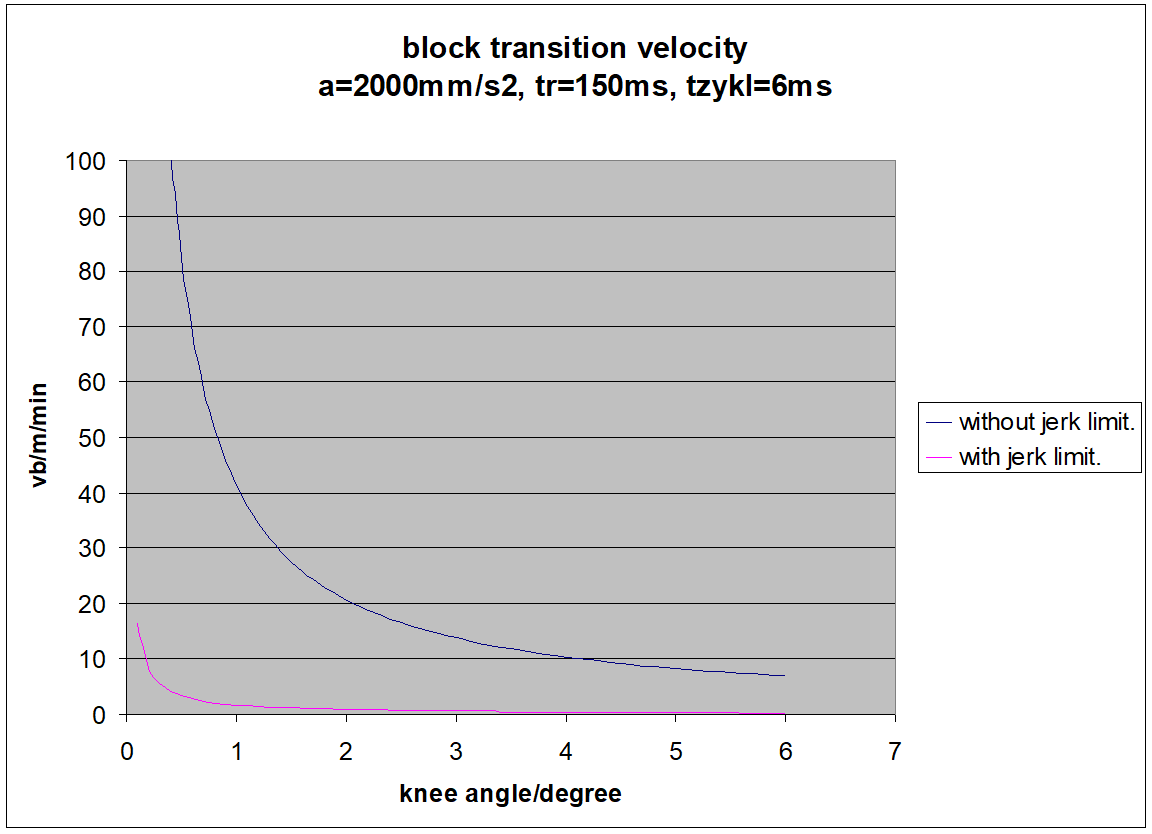
The figure below illustrates the influence of jerk limitation when P-AXIS-00013 = 0 on the block transition velocity between two non-tangential continuous motion blocks and different knee angles.
Example
Parameterisation example
Excerpt from the axis parameter list:
with jerk limitation
without jerk limitation