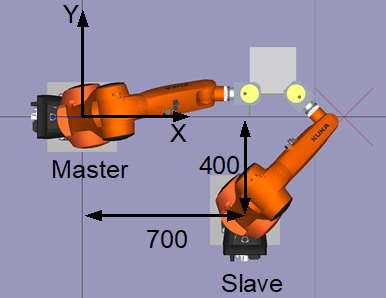
Example 3: Slave tracks the moved workpiece
In this example, the slave tracks the master with position and orientation. The master signals its position to the interface of the dynamic coordinate system. The static offset between slave and master is also specified when the tracking function is activated.
Programming Example
Master = channel 1
%dynCS-Master
;…
N100 G01 X100 Y-45 Z45 A0 B0 C0 F5000
N200 G01 X0 Y-45 Z45 A0 B0 C0 F5000
N1000 #TRAFO[45]
N1010 X720 Y0 Z450 A0 B0 C45 F1500
N2000 #CHANNEL INTERFACE ON [DYN_CS]
;…
N2020 B0
…
N9000 #CHANNEL INTERFACE OFF [DYN_CS]
N9010 #TRAFO OFF
N9020 M30
Programming Example
Slave tracks the moved workpiece
%dynCS-Slave
;…
N3000 G01 X0 Y-45 Z45 A0 B0 C0 F5000 ;Slave ACS
N3010 #TRAFO [45]
N3020 X720 Y0 Z450 F5000 ;Slave MCS
;Slave offset to master MCS
N3030 #CS ON [OFFS] [400,700,0,0,0,-90]
N3040 X620 Y0 Z450 A0 B15 C0 F5000 ; Moved slave in master MCS
; offset is transferred SLAVE to MASTER
N2010 #TRACK CS ON [ID=1 SET_ZERO X=400 Y=700 C=-90 FILTER=0 WAIT]
; Set slave zero point in master centre
; Yaw-Pitch-Roll: Negative B axis
N2020 #CS ON [V.G.TRACK_CS.X, V.G.TRACK_CS.Y, V.G.TRACK_CS.Z,
V.G.TRACK_CS.A, -V.G.TRACK_CS.B, V.G.TRACK_CS.C]
; Move slave to master centre
N2200 X0 Y0 Z0 A0 B0 C0 F500
;…
N2900 #TRACK CS OFF [FILTER=0]
N2910 #CS OFF
;…
N3000 M30