Type 2: Linear Method
Description
The linear method is selected by setting the parameter P-AXIS-00172 to the value 2. It is based on the theoretical position lag at constant axis velocity.
In this case, position lag is calculated as follows:
|
|
|

In addition, the theoretical position lag can be weighted with a factor dependent on P-AXIS-00167 and this is defined as follows:
|
|
|
The permitted position lag is calculated as follows:

|
|
|
|
|
|
|
|
|
 :
: :
:If  < P-AXIS-00168, P-AXIS-00168 is used as the permitted position lag limit.
< P-AXIS-00168, P-AXIS-00168 is used as the permitted position lag limit.
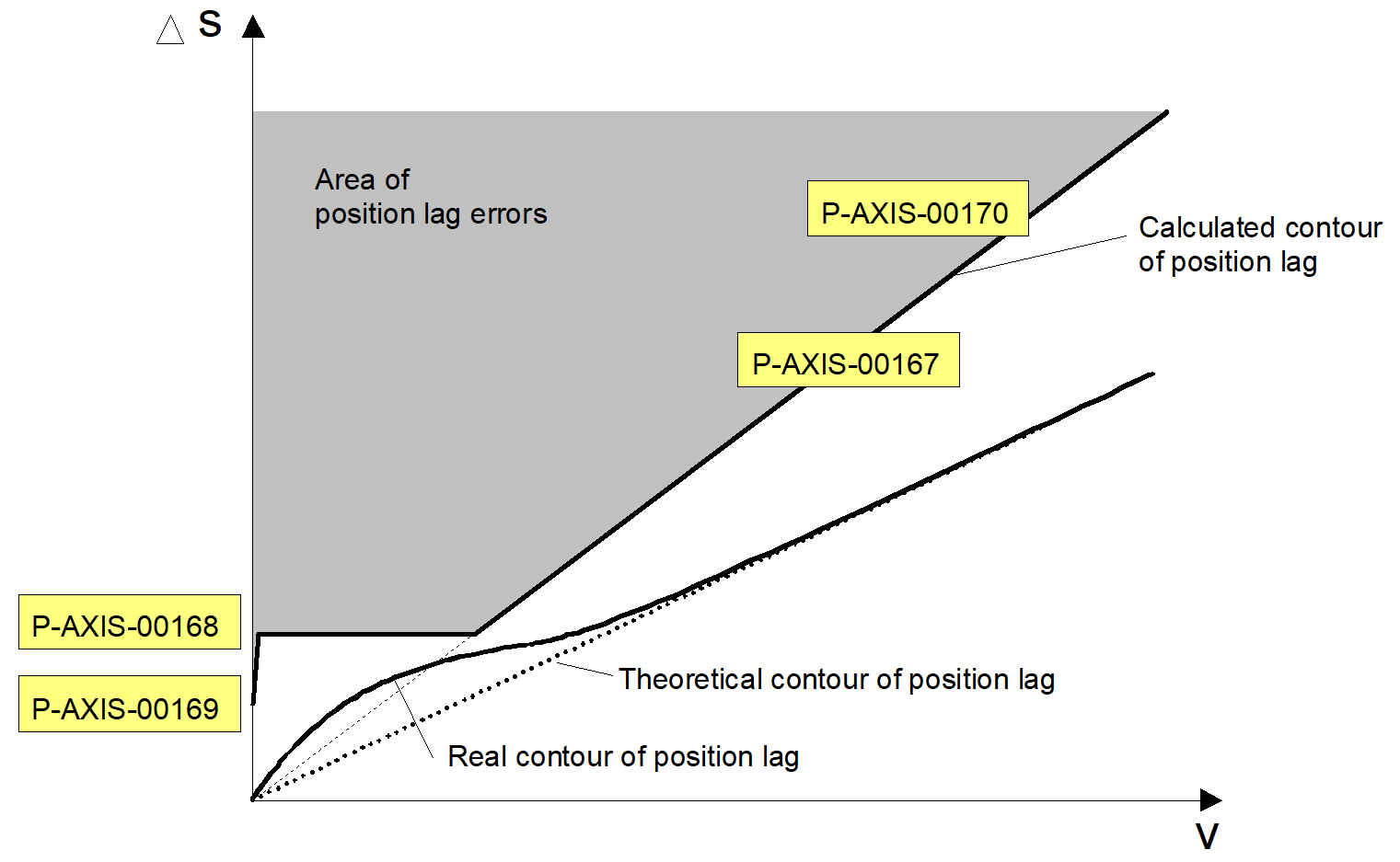
At standstill, P-AXIS-00169 defines the permitted position lag.
The time offset of the permitted position lag is obtained by P-AXIS-00170. The figure below shows the areas of the permitted position lag for the linear method.
 | If position control takes place in the drive, the active position controller gain of the drive must be configured in the parameter P-AXIS-00099. Here, the units must be taken into consideration in each case. |
| Recommended configuration: P-AXIS-00169 ≥ 5 · ∆sStandstill ∆sStandstill: real position lag at standstill |