Settings of position scaling
Example 1
Linear axis with a rotary encoder fitted to the motor with 2^20 increments per motor revolution (indirect measuring system), a gear with a gear ratio of 2:1 (input/output) and a ball screw spindle with a spindle pitch of 20 mm.
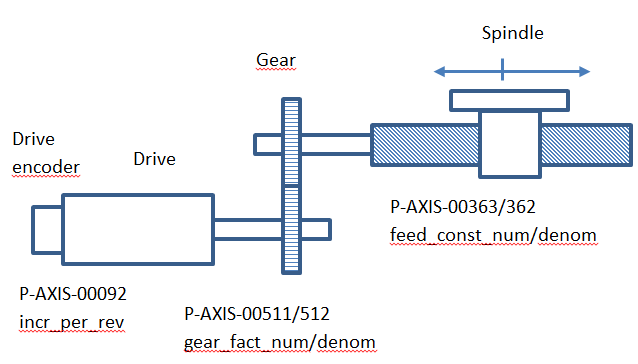
P-AXIS-00092
| 1048576
| ( incr_per_rev 2 ^ 20
( Increments per motor revolution | |
P-AXIS-00362
| 200000
| ( feed_const_num 20 mm
( = 200000 * 0.1 µm | |
P-AXIS-00363
| 1
| ( feed_const_denom 1 revolution
| |
P-AXIS-00511
| 2
| ( gear_fact_num gear
( Input revolutions | |
P-AXIS-00512
| 1
| ( gear_fact_denom gear
( Output revolutions |
Example 2
Linear axis with a linear encoder fitted to the spindle nut with a resolution of 1 µm (direct measuring system), a gear with a gear ratio of 2:1 (input/output) and a ball screw spindle with a spindle pitch of 20 mm.
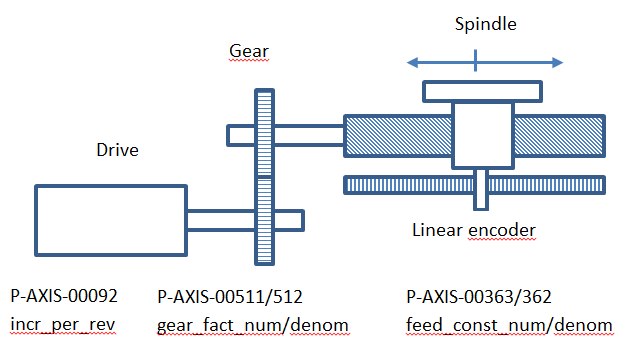
P-AXIS-00092
| 1000
| ( incr_per_rev
( 1000 increments | |
P-AXIS-00362
| 10000
| ( feed_const_num 20 mm
( = 10000 * 0.1 µm | |
P-AXIS-00363
| 1
| ( feed_const_denom 1 revolution
| |
P-AXIS-00511
| 2
| ( gear_fact_num gear
( Input revolutions | |
P-AXIS-00512
| 1
| ( gear_fact_denom gear
( Output revolutions |
Example 3
Spindle with an encoder fitted to the motor with 2^24 increments per revolution and a gear with a gear ratio of 1:3 (input/output).
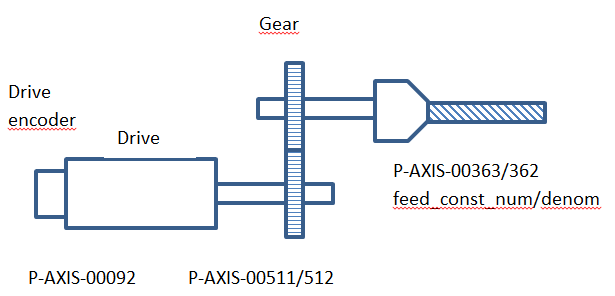
P-AXIS-00092
| 16777216
| ( incr_per_rev
( 2^24 increments | |
P-AXIS-00362
| 3600000
| ( feed_const_num 1 revolution
( The result at the gear output is (360 ° = 360 * 10000 * 0.1 µ° | |
P-AXIS-00363
| 1
| ( feed_const_denom 1 revolution
| |
P-AXIS-00511
| 1
| ( gear_fact_num gear
( Input revolutions | |
P-AXIS-00512
| 3
| ( gear_fact_denom gear
( Output revolutions |
Example 4:
Gear ratios with numerical values with several decimal points.
Assuming:
- A motor delivers 131072 increments per revolution.
- A spindle with a pitch of 1.7/8 inch and
a gear with a ratio of 7:1 are fitted. - Notice that, after ‘expansion’, the product is less than 2^31 - 1. A factor of 1000000 would therefore be too large.
Covered path per motor revolution in 0.1 um:
1.7/8 *25.4 /7 * 10000 = 7710.714285714285714
Expand the above fraction by 10 to remove the decimal point.
(17 * 254000)/(80 * 7)
The entire fraction feed_const_num/ feed_const_denom is thus
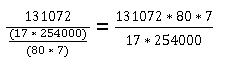
Shortened by 10:
P-AXIS-00092
| 131072
| ( incr_per_rev
| |
P-AXIS-00362
| 7340032
| ( feed_const_num 20 mm
( = 10000 * 0.1 µm | |
P-AXIS-00363
| 431800
| ( feed_const_denom 1 revolution
| |
P-AXIS-00511
| 7
| ( gear_fact_num gear
( Input revolutions | |
P-AXIS-00512
| 1
| ( gear_fact_denom gear
( Output revolutions |