Signal sequence for execution of Execute
Example
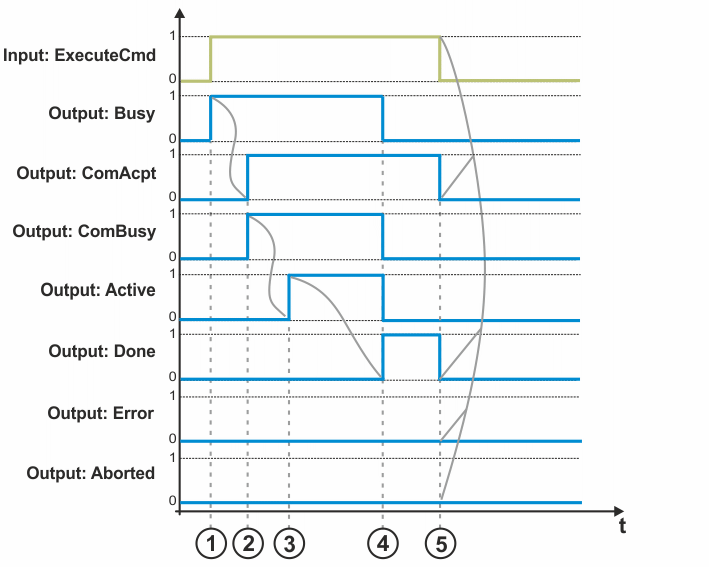
The signal curve is shown for the following case:
- An instruction was transferred via Execute and successfully executed.
Signal curve - Execute successful
Pos. | Description |
|---|---|
1 | The function block is transferred to the robot (= request to execute instruction). |
2 | The instruction has been transferred (= is in the instruction buffer of the robot). The ComAcpt and ComBusy outputs are set. |
3 | The instruction is currently executed. |
4 | The instruction was completed successfully. Neither an error occurred nor was the instruction aborted, e.g. by KRC_Abort. In case of an error, the Error signal would be set instead of the Done signal, and in case of an abort, the Aborted signal would be set instead of the Done signal. |
5 | When the Execute input is reset, the outputs are also reset. |