Static Transformation
The static transformation enables creation of a cartesian gantry. It supports translation and rotation between two cartesian coordinate systems.
The static transformation forms the kinematic, so that the kinematic group is formed with the static transformation. In contrast, a Coordinate system (Coordinate Frame) adds a translation and a rotation to an existing kinematic.
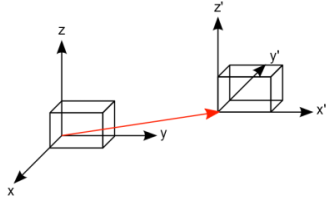
First the translation is calculated, then the rotation. The order of the rotations affects the orientation of the coordinate system. The roll/pitch/yaw rule described in DIN 9300 is used as default for the rotation sequence. The calculation sequence for the forward transformation is Z, Y', X''.
Parameter | Description | Type | Unit |
|---|---|---|---|
Translation X | Shift in X-direction |
| mm |
Translation Y | Shift in Y-direction |
| mm |
Translation Z | Shift in Z-direction |
| mm |
Rotation 1 | First rotation angle. The interpretation is defined by the parameter Rotation convention. |
| ° |
Rotation 2 | Second rotation angle. The interpretation is defined by the parameter Rotation convention. |
| ° |
Rotation 3 | Third rotation angle. The interpretation is defined by the parameter Rotation convention. |
| ° |
Rotation convention | The rotation convention indicates the order of the axis rotations (parameter Rotation 1-3). The letters (X, Y, Z) from left to right indicate the order of the rotation around the corresponding axes. The number indicates the parameter (Rotation 1-3) for the value parameterization. The translatory shift is always performed before the rotation. |
|
|
Spatial reference | The parameter Spatial reference indicates which coordinate system is used as basis for this coordinate system. If the value is set to 0, the WCS is used as basis. To use another coordinate system as starting point for the shift, a further Coordinate system (Coordinate Frame) object can be created. The object ID of this coordinate system can be selected via the dropdown menu. |
|
|
Definition direction | Indicates the direction in which the shift is programmed (from the perspective of the reference system or this coordinate system). |
|
|