Process image
The process image (cyclic interface) of an axis is used to connect it to different drive components. In the simplest case, a link is established between the axis and the drive and the necessary links between the process images are made automatically. In individual cases, in particular when unknown hardware components are integrated in the system, these links must be established manually.
Drive process image of an axis
Various drive hardware or the corresponding Bus Terminals (+/- 10V, PWM etc.) are connected via the drive process image. Insofar as this hardware is directly supported by the system, no manual configuration is necessary.
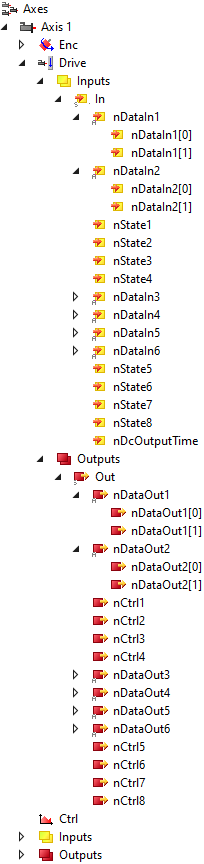
Input data to the drive process image of an axis
NC-In variable | Data type | Description |
|---|---|---|
|
or
| Optional lag error (position control deviation, i.e. target position minus actual position) of the I/O Drive in increments. Exclusively for the operation mode Cyclic Position Mode (e.g. for EtherCAT, Sercos, CANopen). This quantity is processed by the NC accordingly and processed mathematically as an “external” lag distance in physical units (e.g. in mm or degrees). Mapping with:
|
|
or
| reserved |
|
| Optional status information E.g.: Drive Error, Drive Enable/Disable, Communication Drive State Machine (e.g. EtherCAT, Sercos, CANopen, PROFIBUS), Register Communication. Mapping with
|
|
| Additional optional status information. e.g.: Drive Error, Drive Enable/Disable, Communication Drive State Machine (e.g. EtherCAT, Sercos, CANopen, PROFIBUS), Register Communication. Mapping with:
|
|
| reserved |
|
| Optional fieldbus-dependent I/O status such as WcState (Working Counter) in the case of EtherCAT or CdlState in the case of Beckhoff Lightbus. |
|
or
| Optional actual torque/force value of the I/O Drive in increments. This variable is processed by the NC accordingly and processed mathematically as "ActTorque" in physical units (e.g. % or A). nDataIn3[0] mapping with:
|
|
or
| reserved |
|
or
| reserved |
|
or
| reserved |
|
| Mapping with:
|
|
| reserved |
|
| reserved |
|
| reserved |
|
| Optional: Used for NC dead time compensation of the drive. |
Output data from the drive process image of an axis
NC-Out variable | Data type | Description |
|---|---|---|
|
or
| Current target velocity or current target position in increments The target velocity or target position of the NC in physical units, e.g. mm or degrees, is mathematically converted back to an incremental value by the NC and transferred to the drive. Overflows of the incremental value are hereby taken into account by the NC in the target position. Depending on the drive type, a standardization of the target velocity or target position is carried out in increments. If the drive type Universal Drive has been selected, nOutData1 contains the overall velocity (incl. position control part) with sign. Mapping with:
|
|
or
| Current target velocity or current target position in increments The target velocity or target position of the NC in physical units, e.g. mm or degrees, is mathematically converted back to an incremental value by the NC and transferred to the drive. Overflows of the incremental value are hereby taken into account by the NC in the target position. Depending on the drive type, a standardization of the target velocity or target position is carried out in increments. If the Universal Drive type has been selected, nOutData2 contains the value of the overall velocity (incl. position control part, without sign). Mapping with:
|
|
| Optional control information e.g.: Drive Reset, Drive Enable/Disable, Communication Drive State Machine (e.g. EtherCAT, Sercos, CANopen, PROFIBUS), Register Communication. Mapping with:
|
|
| Additional optional control information Digital direction output of the setpoint generation (corresponds to the sign of the target velocity, hence without position controller) Digital Outputs Setpoint Generator: Mapping with
|
|
| Additional optional control information Digital direction output or drive stages of the total output (sum of setpoint generation and position controller) Digital Outputs (Setpoint Generator + Position Controller): |
|
| reserved |
|
or
| Current target acceleration (2nd time derivative of target position) in increments. Optionally, it can also contain the current target torque in increments (e.g. from an extended transformation with dynamic model). The target acceleration and the target torque can be available either individually or as a sum of the individual variables (depending on the parameterization of the output scaling). The output size is signed. Mapping with:
|
|
or
| Mapping with:
|
|
or
| Mapping with:
|
|
or
| Mapping with:
|
|
| Mapping with:
|
|
| reserved |
|
| reserved |
|
| reserved |