Time Compensation
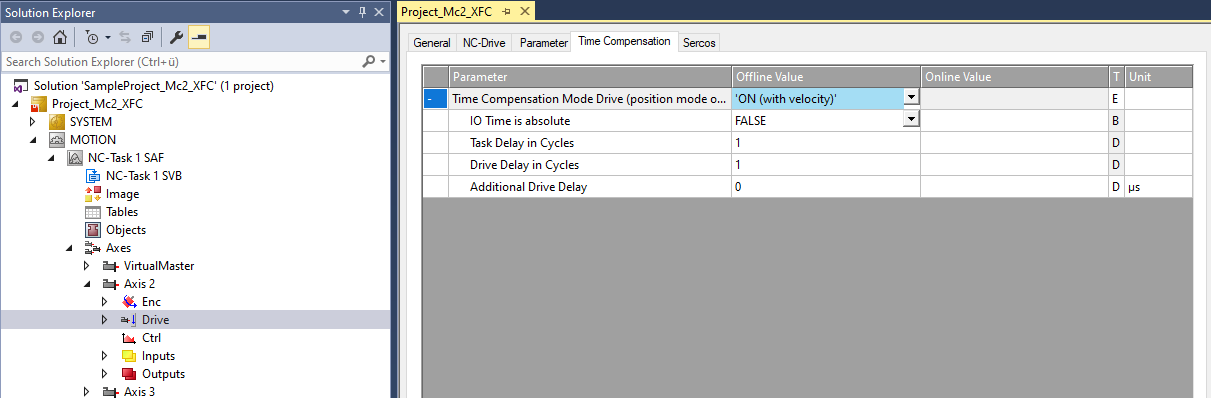
A requirement for high-precision conversion of positions into times and vice versa is precise dead time compensation of the axes. The dead time compensation can be enabled and configured via Drive > Tab Time Compensation in the output direction.
Parameter | Description | Type | Unit |
|---|---|---|---|
Time Compensation Mode Drive (position mode only) | Enabling/disabling the dead time compensation of the axis drive incl. selection of the mode:
| enum |
|
IO Time is absolute | Default Must be set to | bool |
|
Task Delay in Cycles | Delay due to NC SAF cycle time. Default 1 | double |
|
Drive Delay in Cycles | Additional delays by entire I/O cycles. This time is not a fixed value, but changes with the cycle time. | double |
|
Additional Drive Delay | Fixed time value in μs caused by the hardware used. | double | µs |
Further details on dead time compensation can be found in the documentation TF5065 TwinCAT 3 | PLC Motion Control XFC/XFC NCI.