Process image
The process image (cyclic interface) of an axis is used to connect it to different drive components. In the simplest case, a link is established between the axis and the drive and the necessary links between the process images are made automatically. In individual cases, in particular when unknown hardware components are integrated in the system, these links must be established manually.
Encoder process image of an axis
Various encoder hardware or the corresponding Bus Terminals for detecting the position of an axis are connected via the encoder process image (cyclic data exchange). Insofar as this hardware is directly supported by the system, no manual configuration of individual variables is necessary.
Depending on the encoder/drive, the NC variables can be interpreted as signed or unsigned. In addition, the nDataIn variables can be linked with 2 or 4 byte references. (In the special case not discussed here also with 8 byte references)
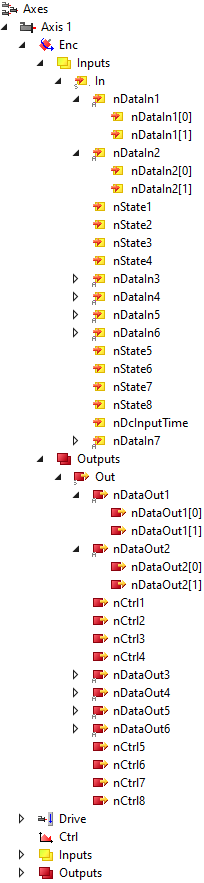
Input data to the encoder process image of an axis
NC-In variable | Data type | Description |
|---|---|---|
or
|
or
| Current actual position of the encoder or the drive in increments. The number of allowed increments is defined in the encoder parameter Encoder Mask (maximum encoder value). The incremental value is processed by the NC and converted to the actual position in physical units, e.g. mm or degrees. Overflows of the incremental values are also counted by the NC. The system normally makes no distinction between incremental and absolute encoders, see encoder parameter Reference System. Mapping with:
|
or
|
or
| Optional actual latch position of the encoder or the drive in increments. The incremental value is processed by the NC and converted to the actual position in physical units, e.g. mm or degrees. (See function block MC_TouchProbe.) Mapping with:
|
|
| Optional status information For example Participant in Data Exchange, Encoder Error, communication to Position Latch or Register Communication. Mapping with:
|
|
| Additional optional status information For example, communication to Position Latch, communication Encoder Reset, communication to Read an Absolute Position. Mapping with:
|
|
| reserved |
|
| Optional fieldbus-dependent I/O status such as WcState (Working Counter) in the case of EtherCAT or CdlState in the case of Beckhoff Lightbus. Meaning: |
|
or
| Mapping with:
|
|
or
| Mapping with:
|
|
or
| Mapping with:
|
|
or
| Mapping with:
|
|
| Mapping with:
|
|
| Mapping with:
|
|
| Mapping with:
|
nState8 |
| Mapping with:
|
|
| Optional: Used for NC dead time compensation of the encoder. |
|
or
| Actual drive velocity from the drive device or from the encoder/feedback. Mapping with:
|
Output data from the encoder process image of an axis
I/O variable | Data type | Description |
|---|---|---|
|
or
| Current actual position of the encoder or drive in increments, which the NC copies directly from the input variable |
|
or
| Mapping with:
|
|
| Optional control information For example, communication to Position Latch, communication Encoder Reset, Register Communication Mapping with:
|
|
| Additional optional control information For example, communication to Position Latch, communication Encoder Reset, communication to Read an Absolute Position. Mapping with:
|
|
| reserved |
|
| reserved |
|
or
| reserved |
|
or
| reserved |
|
or
| reserved |
|
or
| reserved |
|
| Mapping with:
|
|
| Mapping with:
|
|
| reserved |
|
| reserved |