Time Compensation
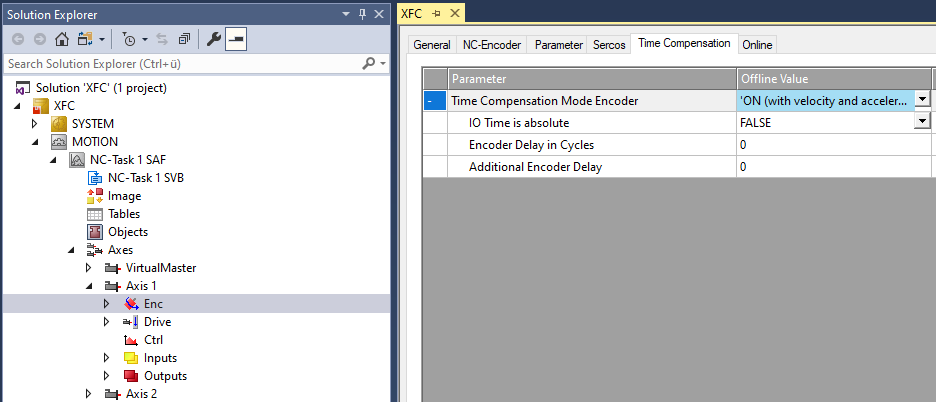
A requirement for high-precision conversion of positions into times and vice versa is precise dead time compensation of the axes. For data acquisition, this can be enabled and configured via the Time Compensation tab of the axis encoder (e.g. Axis 1 > Enc).
Parameter | Description | Type | Unit |
|---|---|---|---|
Time Compensation Mode Encoder | Enabling/disabling the dead time compensation of the axis encoder incl. selection of the mode:
| enum |
|
IO Time is absolute | Default Must be set to | bool |
|
Encoder Delay in Cycles | Additional delays by entire I/O cycles. This time is not a fixed value, but changes with the cycle time. | double |
|
Additional Encoder Delay | Fixed time value in μs caused by the hardware used. | double | µs |
Further details on dead time compensation can be found in the documentation TF5065 TwinCAT 3 | PLC Motion Control XFC/XFC NC I.