Error Codes
 | If you have set GearInPos.SyncMode.GearInSync_OpMask_DetailedErrorCodes := TRUE, the flying saw checks return the detailed messages described below. Otherwise the error number 42DF is output in all checking cases. |
Checks for position limits
Error (hex) | Error (Dec) | Description |
|---|---|---|
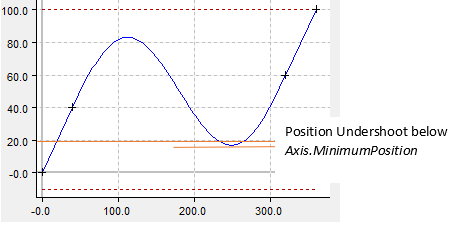
4372 | 17266 | The synchronization profile would violate the lower end position of the slave.
Check when GearInSync_CheckMask_MinPos is active. |
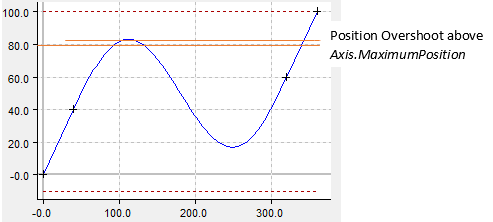
4373 | 17267 | The synchronization profile would violate the upper end position of the slave.
Check when GearInSync_CheckMask_MaxPos is active. |
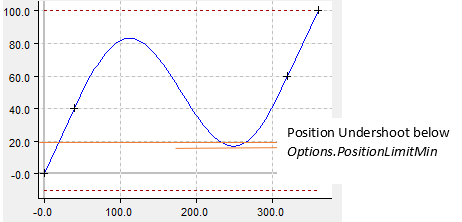
4374 | 17268 | The synchronization profile would violate the user limit position Options.PositionLimitMin.
Check when GearInSync_CheckMask_OptionalMinPos is active. |
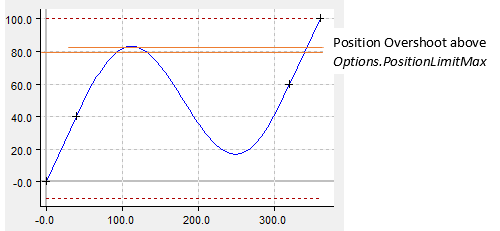
4375 | 17269 | The synchronization profile would violate the user limit position Options.PositionLimitMax.
Check when GearInSync_CheckMask_OptionalMaxPos is active. |
Checks for position overshoots/undershoots
Error (hex) | Error (Dec) | Description |
|---|---|---|
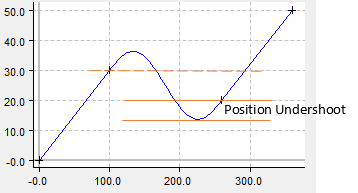
4376 | 17270 | The synchronization point lies under the starting point. As a result, the profile swings under both the start position and the synchronous position.
Check when GearInSync_CheckMask_UndershootPos is active. |
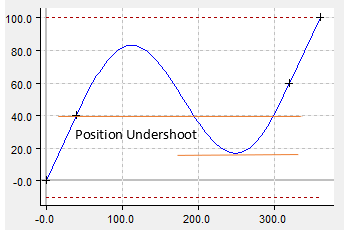
4377 | 17271 | The synchronization profile would swing back under the slave start position of the flying saw.
Check when GearInSync_CheckMask_UndershootPos is active. |
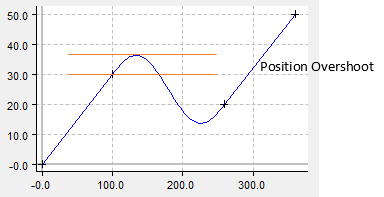
4378 | 17272 | The synchronization point lies under the starting point. The synchronization profile would swing beyond the slave start position of the flying saw.
Check when GearInSync_CheckMask_OvershootPos is active. |
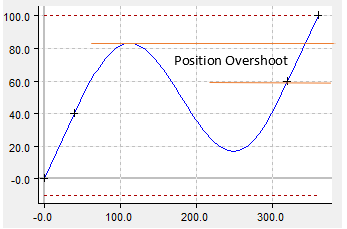
4379 | 17273 | The synchronization profile would swing beyond the slave synchronous position of the flying saw.
Check when GearInSync_CheckMask_OvershootPos is active. |
Checks for maximum velocity
Error (hex) | Error (Dec) | Description |
|---|---|---|
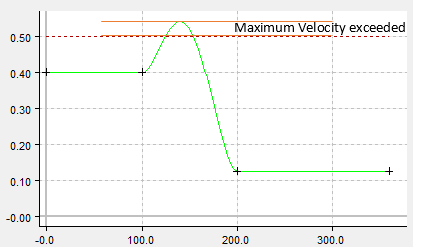
437A | 17274 | The maximum velocity of the synchronization profile is higher than the maximum velocity of the slave axis.
Check when GearInSync_CheckMask_MaxVelo is active. |
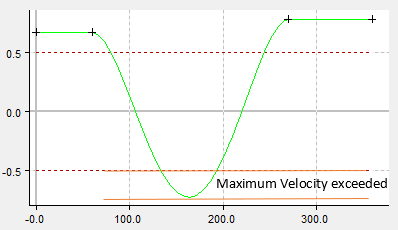
437B | 17275 | The maximum velocity of the synchronization profile is higher than the maximum velocity of the slave axis.
Check when GearInSync_CheckMask_MaxVelo is active. |
Checks for velocity overshoots
Error (hex) | Error (Dec) | Description |
|---|---|---|
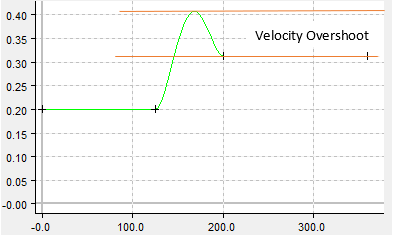
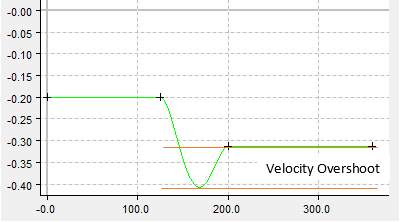
437C | 17276 | The maximum velocity of the synchronization profile would be higher than the synchronous velocity. (Positive direction of travel and starting velocity lower than synchronous velocity)
Check when GearInSync_CheckMask_OvershootVelo is active. |
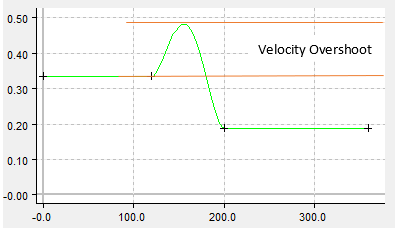
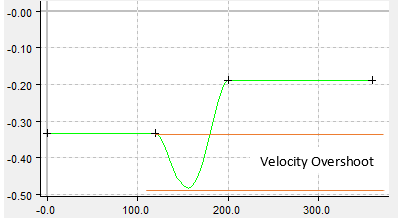
437D | 17277 | The maximum velocity of the synchronization profile would be higher than the starting velocity and synchronous velocity. (Positive direction of travel and starting velocity higher than synchronous velocity)
Check when GearInSync_CheckMask_OvershootVelo is active. |
437E | 17278 | The maximum velocity of the synchronization profile would be higher than the synchronous velocity. (Negative direction of travel and starting velocity lower than synchronous velocity)
Check when GearInSync_CheckMask_OvershootVelo is active |
437F | 17279 | The maximum velocity of the synchronization profile would be higher than the starting velocity and synchronous velocity. (Negative direction of travel and starting velocity higher than synchronous velocity)
Check when GearInSync_CheckMask_OvershootVelo is active. |
Checks for velocity undershoots
Error (hex) | Error (Dec) | Description |
|---|---|---|
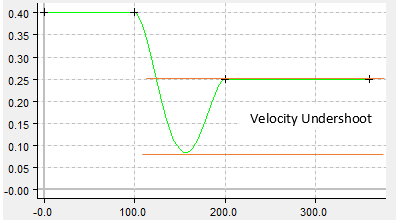
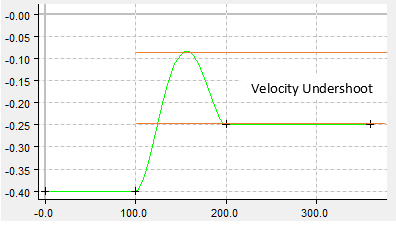
4380 | 17280 | The minimum velocity of the synchronization profile lies below the synchronous velocity. (Positive direction of travel and starting velocity higher than synchronous velocity)
Check when GearInSync_CheckMask_UndershootVelo is active. |
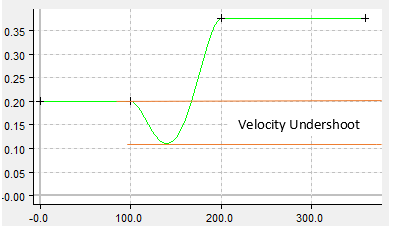
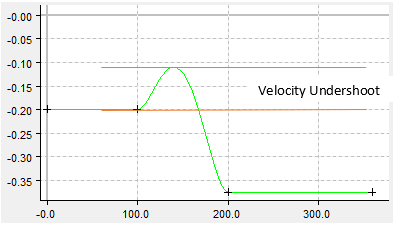
4381 | 17281 | The minimum velocity of the synchronization profile lies below the starting velocity. (Positive direction of travel and starting velocity lower than synchronous velocity)
Check when GearInSync_CheckMask_UndershootVelo is active. |
4382 | 17282 | The minimum velocity of the synchronization profile lies below the synchronous velocity. (Negative direction of travel and starting velocity higher than synchronous velocity)
Check when GearInSync_CheckMask_UndershootVelo is active. |
4383 | 17283 | The minimum velocity of the synchronization profile lies below the starting velocity. (Negative direction of travel and starting velocity lower than synchronous velocity)
Check when GearInSync_CheckMask_UndershootVelo is active. |
Checks for reversal of the direction of travel
Error (hex) | Error (Dec) | Description |
|---|---|---|
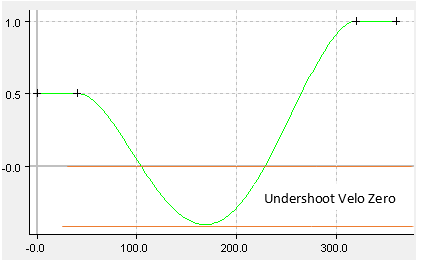
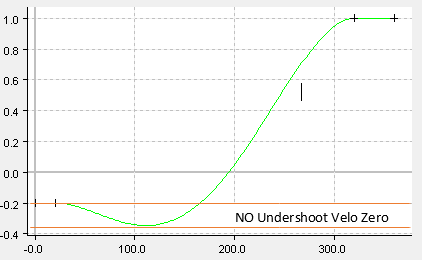
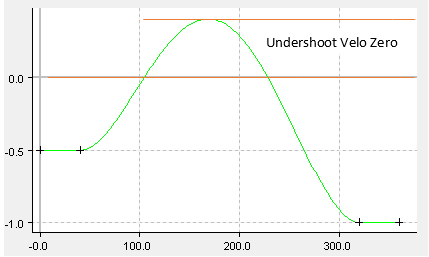
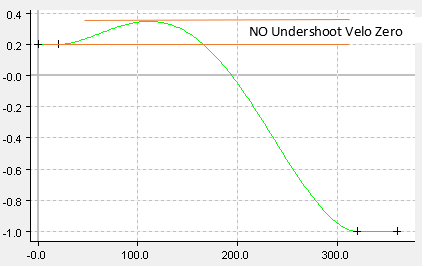
4386 | 17286 | The velocity of the flying saw swings below zero; the motion is reversed. If the slave is already moving in the opposite direction at the beginning, it is not regarded as UndershootVeloZero. (Master moves in the positive direction)
Check when GearInSync_CheckMask_UndershootVeloZero is active. |
4387 | 17287 | The velocity of the flying saw swings below zero; the motion is reversed. If the slave is already moving in the opposite direction at the beginning, it is not regarded as UndershootVeloZero. (Master moves in the negative direction)
Check when GearInSync_CheckMask_UndershootVeloZero is active. |
Checks for maximum acceleration
Error (hex) | Error (Dec) | Description |
|---|---|---|
4388 | 17288 | The maximum acceleration of the synchronization profile would be higher than the maximum acceleration of the slave axis. Check when GearInSync_CheckMask_MaxAcc is active. |
4389 | 17289 | The maximum deceleration of the synchronization profile would be higher than the maximum deceleration of the slave axis. Check when GearInSync_CheckMask_MaxDec is active. |
Checks for the maximum jerk
Error (hex) | Error (Dec) | Description |
|---|---|---|
438A | 17290 | The maximum jerk of the synchronization profile would be higher than the maximum jerk of the slave axis. Check when GearInSync_CheckMask_MaxJerk is active (check the SlaveJerkMax). |
438B | 17291 | The maximum jerk of the synchronization profile would be higher than the maximum jerk of the slave axis. Check when GearInSync_CheckMask_MaxJerk is active (check the SlaveJerkMin). |